Left-Invariant Extended Kalman Filter implementation. More...
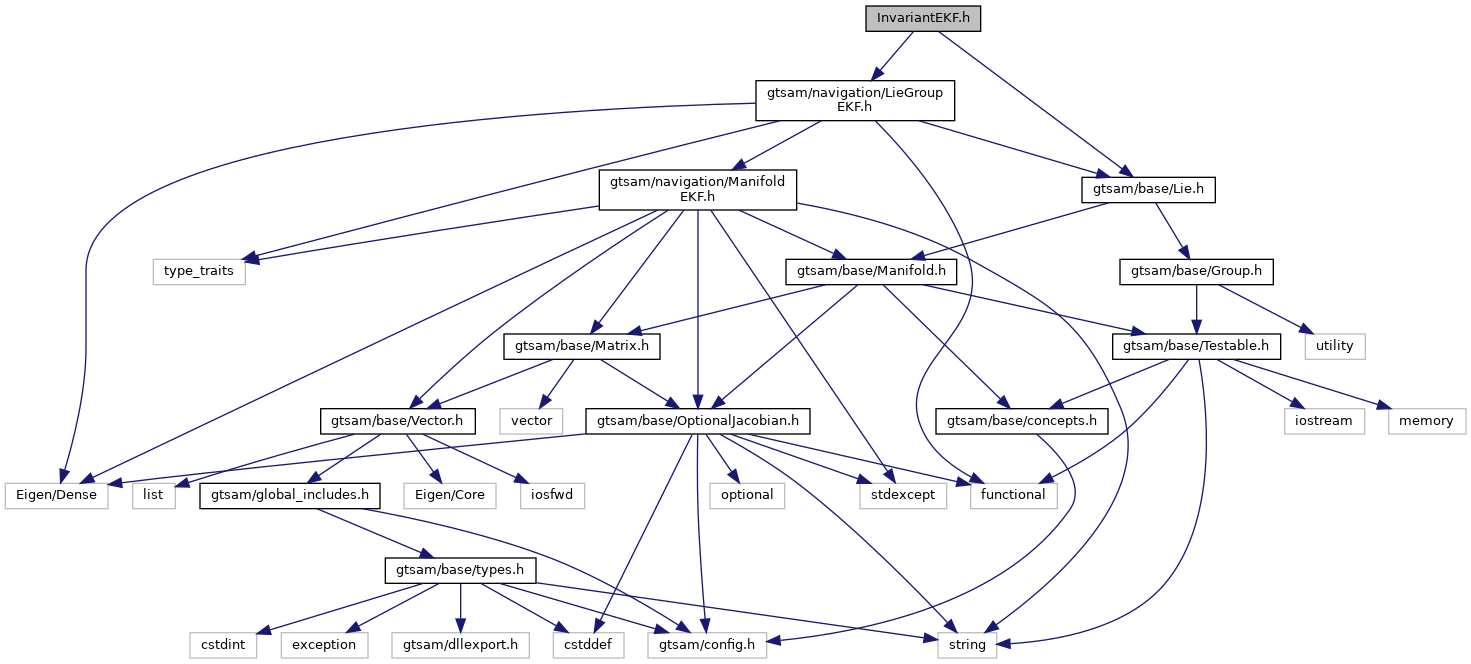
Include dependency graph for InvariantEKF.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | gtsam::InvariantEKF< G > |
| Left-Invariant Extended Kalman Filter on a Lie group G. More... | |
Namespaces | |
| gtsam | |
| traits | |
Detailed Description
Left-Invariant Extended Kalman Filter implementation.
This file defines the InvariantEKF class template, inheriting from LieGroupEKF, which specifically implements the Left-Invariant EKF formulation. It restricts prediction methods to only those based on group composition (state-independent motion models), hiding the state-dependent prediction variants from LieGroupEKF.
- Date
- April 24, 2025
Definition in file InvariantEKF.h.