Detailed Description
Template routines for efficient manipulation of square root matricies, used for least squares estimation and the SRI form of the Kalman filter.
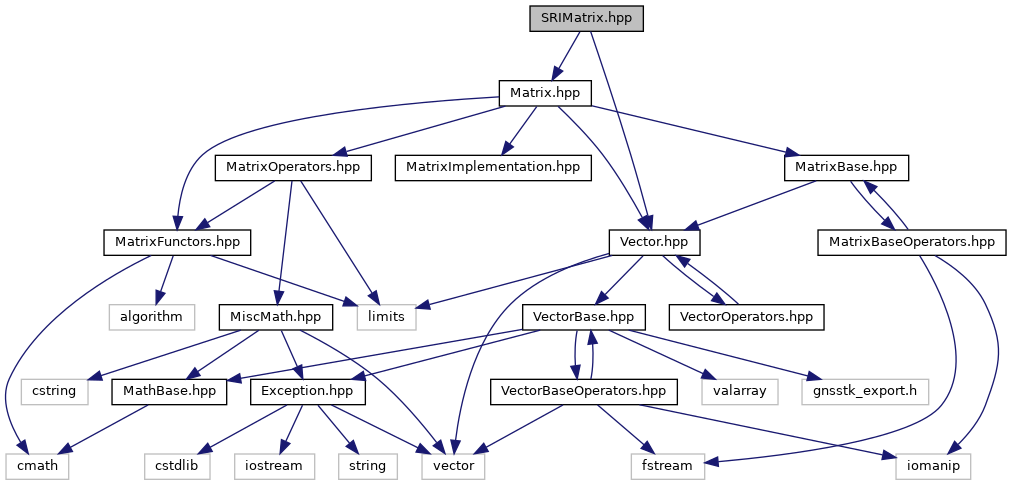
Definition in file SRIMatrix.hpp.
Include dependency graph for SRIMatrix.hpp:
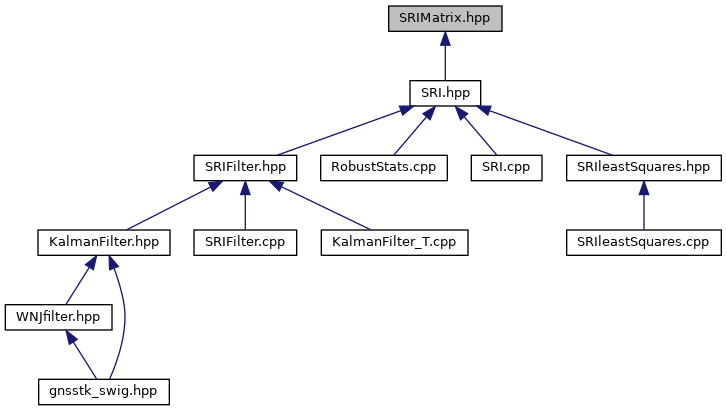
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| gnsstk | |
| For Sinex::InputHistory. | |
Functions | |
| template<class T > | |
| Matrix< T > | gnsstk::inverseCholesky (const Matrix< T > &A) |
| template<class T > | |
| Matrix< T > | gnsstk::inverseLT (const Matrix< T > <, T *ptrSmall=NULL, T *ptrBig=NULL) |
| template<class T > | |
| Matrix< T > | gnsstk::inverseUT (const Matrix< T > &UT, T *ptrSmall=NULL, T *ptrBig=NULL) |
| template<class T > | |
| Matrix< T > | gnsstk::LDL (const Matrix< T > &A, Vector< T > &D) |
| template<class T > | |
| Matrix< T > | gnsstk::lowerCholesky (const Matrix< T > &A, const T ztol=T(1.e-16)) |
| template<class T > | |
| void | gnsstk::SrifMU (Matrix< T > &R, Vector< T > &Z, const Matrix< T > &H, Vector< T > &D, unsigned int M=0) |
| template<class T > | |
| void | gnsstk::SrifMU (Matrix< T > &R, Vector< T > &Z, Matrix< T > &A, unsigned int M=0) |
| template<class T > | |
| Matrix< T > | gnsstk::UDU (const Matrix< T > &A, Vector< T > &D) |
| template<class T > | |
| Matrix< T > | gnsstk::upperCholesky (const Matrix< T > &A, const T ztol=T(1.e-16)) |
| template<class T > | |
| Matrix< T > | gnsstk::UTtimesTranspose (const Matrix< T > &UT) |