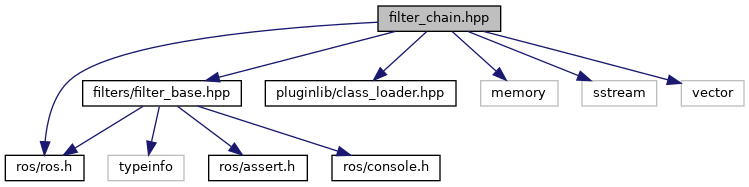
#include "ros/ros.h"#include "filters/filter_base.hpp"#include <pluginlib/class_loader.hpp>#include <memory>#include <sstream>#include <vector>
Include dependency graph for filter_chain.hpp:
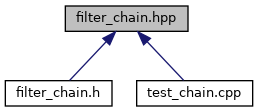
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | filters::FilterChain< T > |
| A class which will construct and sequentially call Filters according to xml This is the primary way in which users are expected to interact with Filters. More... | |
| class | filters::MultiChannelFilterChain< T > |
| A class which will construct and sequentially call Filters according to xml This is the primary way in which users are expected to interact with Filters. More... | |
Namespaces | |
| filters | |