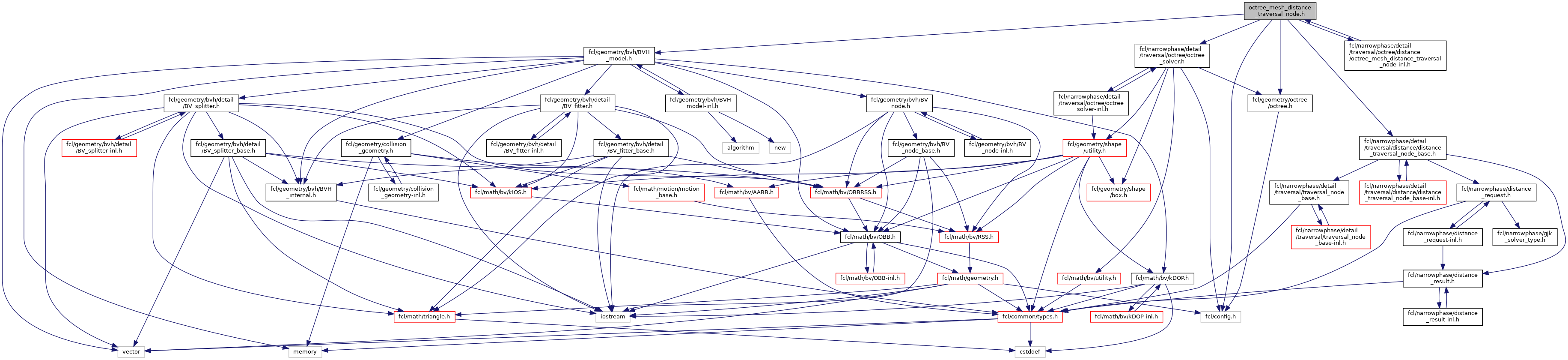
#include "fcl/config.h"#include "fcl/geometry/octree/octree.h"#include "fcl/geometry/bvh/BVH_model.h"#include "fcl/narrowphase/detail/traversal/distance/distance_traversal_node_base.h"#include "fcl/narrowphase/detail/traversal/octree/octree_solver.h"#include "fcl/narrowphase/detail/traversal/octree/distance/octree_mesh_distance_traversal_node-inl.h"
Include dependency graph for octree_mesh_distance_traversal_node.h:
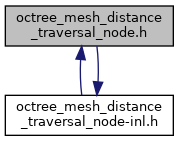
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | fcl::detail::OcTreeMeshDistanceTraversalNode< BV, NarrowPhaseSolver > |
| Traversal node for octree-mesh distance. More... | |
Namespaces | |
| fcl | |
| Main namespace. | |
| fcl::detail | |
Functions | |
| template<typename BV , typename NarrowPhaseSolver > | |
| bool | fcl::detail::initialize (OcTreeMeshDistanceTraversalNode< BV, NarrowPhaseSolver > &node, const OcTree< typename BV::S > &model1, const Transform3< typename BV::S > &tf1, const BVHModel< BV > &model2, const Transform3< typename BV::S > &tf2, const OcTreeSolver< NarrowPhaseSolver > *otsolver, const DistanceRequest< typename BV::S > &request, DistanceResult< typename BV::S > &result) |
| Initialize traversal node for collision between one octree and one mesh, given current object transform. More... | |