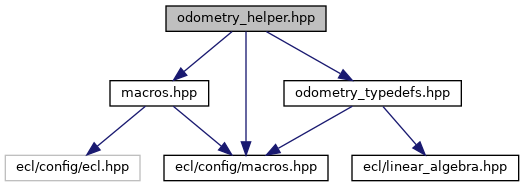
Include dependency graph for odometry_helper.hpp:
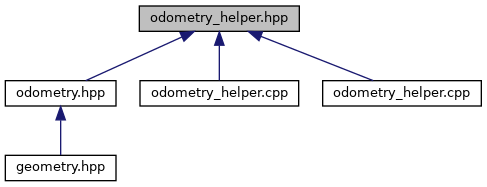
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| ecl | |
| Embedded control libraries. | |
| ecl::odometry | |
Functions | |
| ecl_geometry_PUBLIC void | ecl::odometry::addAtEnd (Odom2DTrajectory &target, const Odom2DTrajectory &addition) |
| ecl_geometry_PUBLIC void | ecl::odometry::addAtEnd (Trajectory2D &target, const Trajectory2D &addition) |
| Concat two odometry trajectories. More... | |
| ecl_geometry_PUBLIC double | ecl::odometry::distance (const Odom2D &a, const Odom2D &b) |
| Distance between the positions of odometries. More... | |
| ecl_geometry_PUBLIC double | ecl::odometry::distance (const Pose2D &a, const Odom2D &b) |
| Distance between a pose and the position of a odometry. More... | |
| ecl_geometry_PUBLIC double | ecl::odometry::distance (const Pose2D &a, const Pose2D &b) |
| Distance between poses. More... | |
| ecl_geometry_PUBLIC double | ecl::odometry::distance (const Pose2D &pose, const Trajectory2D &trajectory) |
| Shortest distance between a pose and a trajectory. More... | |
| ecl_geometry_PUBLIC double | ecl::odometry::distance (const Position2D &position, const Trajectory2D &trajectory) |
| Shortest distance between a position and a trajectory. More... | |
| ecl_geometry_PUBLIC double | ecl::odometry::distanceSqared (const Odom2D &a, const Odom2D &b) |
| Squared distance between the positions of odometries. More... | |
| ecl_geometry_PUBLIC double | ecl::odometry::distanceSqared (const Pose2D &a, const Pose2D &b) |
| Squared distance between poses. More... | |
| ecl_geometry_PUBLIC bool | ecl::odometry::empty (const Odom2DTrajectory &trajectory) |
| Check if trajectory ptr is empty (ptr not set or has no odometries) More... | |
| ecl_geometry_PUBLIC bool | ecl::odometry::empty (const Trajectory2D &trajectory) |
| Check if trajectory ptr is empty (ptr not set or has no poses) More... | |
| ecl_geometry_PUBLIC Odom2D | ecl::odometry::getAt (const Odom2DTrajectory &trajectory, const int &index) |
| Get element of trajectory. More... | |
| ecl_geometry_PUBLIC Pose2D | ecl::odometry::getAt (const Trajectory2D &trajectory, const int &index) |
| Get element of trajectory. More... | |
| ecl_geometry_PUBLIC Odom2D | ecl::odometry::getBack (const Odom2DTrajectory &trajectory) |
| Get back (last) element of trajectory. More... | |
| ecl_geometry_PUBLIC Pose2D | ecl::odometry::getBack (const Trajectory2D &trajectory) |
| Get back (last) element of trajectory. More... | |
| ecl_geometry_PUBLIC Odom2D | ecl::odometry::getFront (const Odom2DTrajectory &trajectory) |
| Get front (first) element of trajectory. More... | |
| ecl_geometry_PUBLIC Pose2D | ecl::odometry::getFront (const Trajectory2D &trajectory) |
| Get front (first) element of trajectory. More... | |
| ecl_geometry_PUBLIC Pose2D | ecl::odometry::getPose (const Odom2D &odom) |
| Extract pose from odometry. More... | |
| ecl_geometry_PUBLIC Trajectory2D | ecl::odometry::getPoses (const Odom2DTrajectory &trajectory) |
| Extract poses of odom trajectory. More... | |
| ecl_geometry_PUBLIC Position2D | ecl::odometry::getPosition (const Odom2D &odom) |
| Extract position from odometry. More... | |
| ecl_geometry_PUBLIC Position2D | ecl::odometry::getPosition (const Pose2D &pose) |
| Extract position from pose. More... | |
| ecl_geometry_PUBLIC Twist2D | ecl::odometry::getTwist (const Odom2D &odom) |
| Extract twist from odometry. More... | |
| ecl_geometry_PUBLIC Twist2DVector | ecl::odometry::getTwists (const Odom2DTrajectory &trajectory) |
| Extract twists of odom trajectory. More... | |
| ecl_geometry_PUBLIC float | ecl::odometry::getVelocityAngular (const Odom2D &odom) |
| Get angular velocity. More... | |
| ecl_geometry_PUBLIC float | ecl::odometry::getVelocityAngular (const Twist2D &twist) |
| Get angular velocity. More... | |
| ecl_geometry_PUBLIC float | ecl::odometry::getVelocityX (const Odom2D &odom) |
| Get linear velocity x direction. More... | |
| ecl_geometry_PUBLIC float | ecl::odometry::getVelocityX (const Twist2D &twist) |
| Get linear velocity x direction. More... | |
| ecl_geometry_PUBLIC float | ecl::odometry::getVelocityY (const Odom2D &odom) |
| Get linear velocity y direction. More... | |
| ecl_geometry_PUBLIC float | ecl::odometry::getVelocityY (const Twist2D &twist) |
| Get linear velocity y direction. More... | |
| ecl_geometry_PUBLIC float | ecl::odometry::getX (const Odom2D &odom) |
| Get x position. More... | |
| ecl_geometry_PUBLIC float | ecl::odometry::getX (const Pose2D &pose) |
| Get x position. More... | |
| ecl_geometry_PUBLIC float | ecl::odometry::getX (const Position2D &position) |
| Get x position. More... | |
| ecl_geometry_PUBLIC float | ecl::odometry::getY (const Odom2D &odom) |
| Get y position. More... | |
| ecl_geometry_PUBLIC float | ecl::odometry::getY (const Pose2D &pose) |
| Get y position. More... | |
| ecl_geometry_PUBLIC float | ecl::odometry::getY (const Position2D &position) |
| Get y position. More... | |
| ecl_geometry_PUBLIC float | ecl::odometry::getYaw (const Odom2D &odom) |
| Get yaw (heading) More... | |
| ecl_geometry_PUBLIC float | ecl::odometry::getYaw (const Pose2D &pose) |
| Get yaw (heading) More... | |
| ecl_geometry_PUBLIC void | ecl::odometry::resize (Odom2DTrajectory &trajectory, const int &size) |
| ecl_geometry_PUBLIC void | ecl::odometry::resize (Trajectory2D &trajectory, const int &size) |
| Resizes trajectory appending uninitialised values if needed. More... | |
| ecl_geometry_PUBLIC void | ecl::odometry::setAt (Odom2DTrajectory &trajectory, const int &index, const Odom2D &odom) |
| Set element at index of trajectory. More... | |
| ecl_geometry_PUBLIC void | ecl::odometry::setAt (Trajectory2D &trajectory, const int &index, const Pose2D &pose) |
| Set element at index of trajectory. More... | |
| ecl_geometry_PUBLIC void | ecl::odometry::setVelocityAngular (Odom2D &odom, const float &value) |
| Set angular velocity. More... | |
| ecl_geometry_PUBLIC void | ecl::odometry::setVelocityAngular (Twist2D &twist, const float &value) |
| Set angular velocity. More... | |
| ecl_geometry_PUBLIC void | ecl::odometry::setVelocityX (Odom2D &odom, const float &value) |
| Set linear velocity x direction. More... | |
| ecl_geometry_PUBLIC void | ecl::odometry::setVelocityX (Twist2D &twist, const float &value) |
| Set linear velocity x direction. More... | |
| ecl_geometry_PUBLIC void | ecl::odometry::setVelocityY (Odom2D &odom, const float &value) |
| Set linear velocity y direction. More... | |
| ecl_geometry_PUBLIC void | ecl::odometry::setVelocityY (Twist2D &twist, const float &value) |
| Set linear velocity y direction. More... | |
| ecl_geometry_PUBLIC void | ecl::odometry::setX (Odom2D &odom, const float &value) |
| Set x position. More... | |
| ecl_geometry_PUBLIC void | ecl::odometry::setX (Pose2D &pose, const float &value) |
| Set x position. More... | |
| ecl_geometry_PUBLIC void | ecl::odometry::setX (Position2D &position, const float &value) |
| Set x position. More... | |
| ecl_geometry_PUBLIC void | ecl::odometry::setY (Odom2D &odom, const float &value) |
| Set y position. More... | |
| ecl_geometry_PUBLIC void | ecl::odometry::setY (Pose2D &pose, const float &value) |
| Set y position. More... | |
| ecl_geometry_PUBLIC void | ecl::odometry::setY (Position2D &position, const float &value) |
| Set y position. More... | |
| ecl_geometry_PUBLIC void | ecl::odometry::setYaw (Odom2D &odom, const float &value) |
| Set yaw (heading) More... | |
| ecl_geometry_PUBLIC void | ecl::odometry::setYaw (Pose2D &pose, const float &value) |
| Set yaw (heading) More... | |
| ecl_geometry_PUBLIC int | ecl::odometry::size (const Odom2DTrajectory &trajectory) |
| Get the size of the trajectory. More... | |
| ecl_geometry_PUBLIC int | ecl::odometry::size (const Trajectory2D &trajectory) |
| Get the size of the trajectory. More... | |
| ecl_geometry_PUBLIC Odom2DTrajectory | ecl::odometry::vectorToTrajectory (const std::vector< Odom2D > &vec) |
| Convert vector of Odom2D to Odom2DTrajectory. More... | |
| ecl_geometry_PUBLIC Trajectory2D | ecl::odometry::vectorToTrajectory (const std::vector< Pose2D > &vec) |
| Convert vector of Pose2D to Trajectory2D. More... | |