Implements the hardware abstraction for communicating with dynamixels. More...
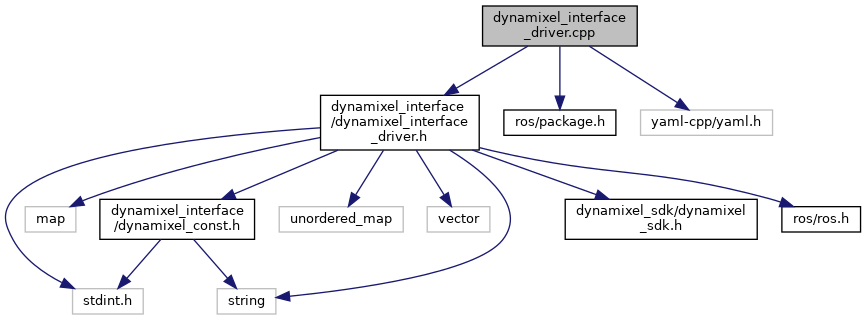
#include <dynamixel_interface/dynamixel_interface_driver.h>#include <ros/package.h>#include "yaml-cpp/yaml.h"
Include dependency graph for dynamixel_interface_driver.cpp:
Go to the source code of this file.
Namespaces | |
| dynamixel_interface | |
Detailed Description
Implements the hardware abstraction for communicating with dynamixels.
- Date
- January, 2017
Definition in file dynamixel_interface_driver.cpp.