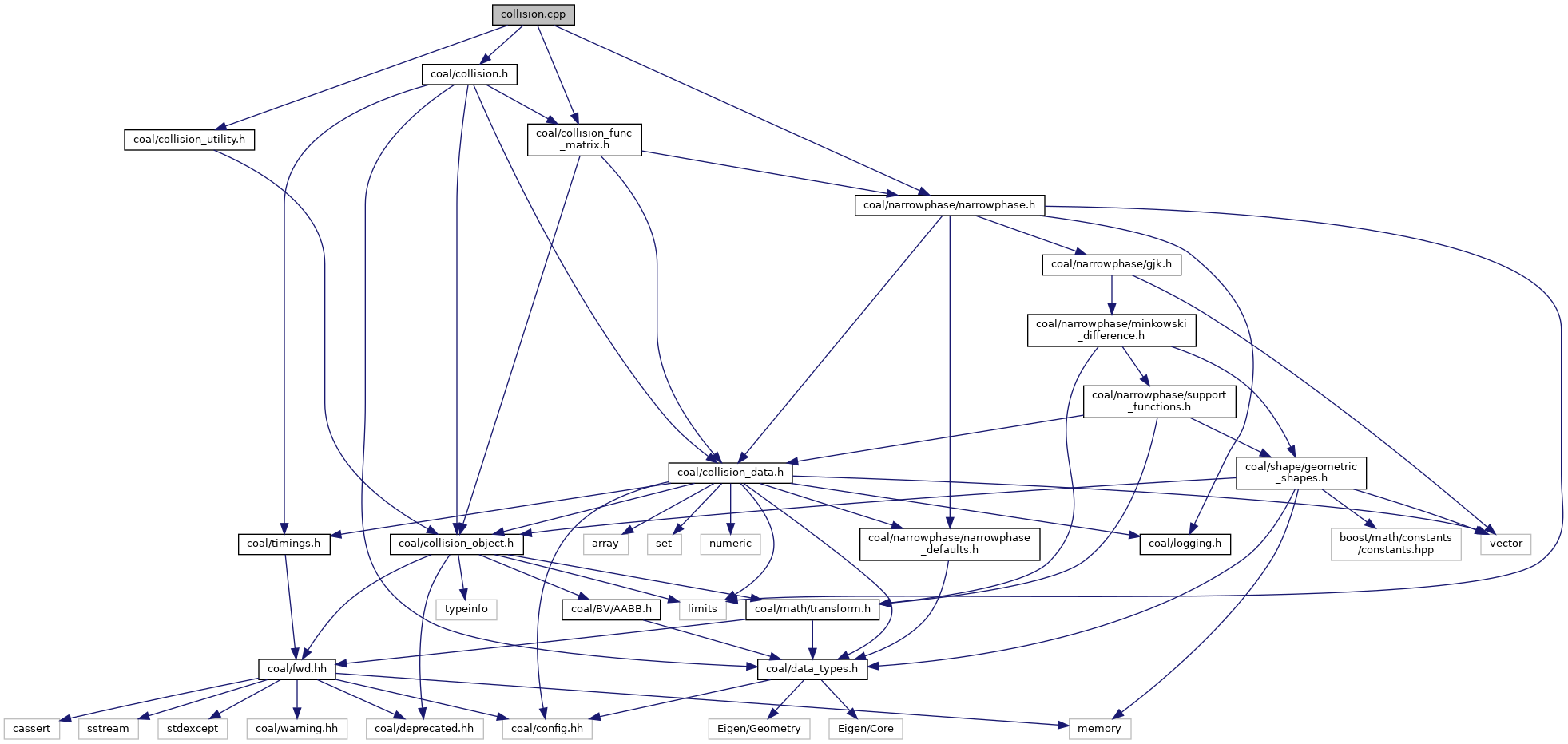
#include "coal/collision.h"#include "coal/collision_utility.h"#include "coal/collision_func_matrix.h"#include "coal/narrowphase/narrowphase.h"
Include dependency graph for src/collision.cpp:
Go to the source code of this file.
Namespaces | |
| coal | |
| Main namespace. | |
Functions | |
| COAL_DLLAPI std::size_t | coal::collide (const CollisionGeometry *o1, const Transform3s &tf1, const CollisionGeometry *o2, const Transform3s &tf2, const CollisionRequest &request, CollisionResult &result) |
| COAL_DLLAPI std::size_t | coal::collide (const CollisionObject *o1, const CollisionObject *o2, const CollisionRequest &request, CollisionResult &result) |
| Main collision interface: given two collision objects, and the requirements for contacts, including num of max contacts, whether perform exhaustive collision (i.e., returning returning all the contact points), whether return detailed contact information (i.e., normal, contact point, depth; otherwise only contact primitive id is returned), this function performs the collision between them. Return value is the number of contacts generated between the two objects. More... | |
| CollisionFunctionMatrix & | coal::getCollisionFunctionLookTable () |