#include "aruco_export.h"#include <opencv2/core/core.hpp>#include <cstdio>#include <iostream>#include <queue>#include <mutex>#include <condition_variable>#include <vector>#include <map>#include "marker.h"#include <opencv2/imgproc/imgproc.hpp>
Include dependency graph for markerdetector.h:

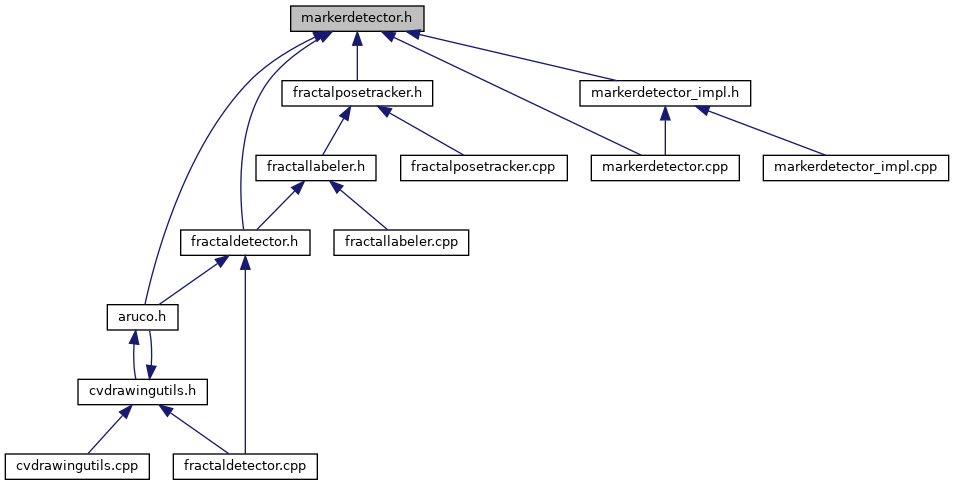
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | aruco::MarkerDetector |
| Main class for marker detection. More... | |
| struct | aruco::MarkerDetector::Params |
Namespaces | |
| aruco | |
Typedefs | |
| typedef Marker | aruco::MarkerCandidate |
Enumerations | |
| enum | aruco::CornerRefinementMethod : int { aruco::CORNER_SUBPIX = 0, aruco::CORNER_LINES = 1, aruco::CORNER_NONE = 2 } |
| enum | aruco::DetectionMode : int { aruco::DM_NORMAL = 0, aruco::DM_FAST = 1, aruco::DM_VIDEO_FAST = 2 } |
| The DetectionMode enum defines the different possibilities for detection. Specifies the detection mode. We have preset three types of detection modes. These are ways to configure the internal parameters for the most typical situations. The modes are: More... | |