#include "ur_client_library/control/reverse_interface.h"#include "ur_client_library/comm/control_mode.h"#include "ur_client_library/types.h"#include "ur_client_library/log.h"
Include dependency graph for trajectory_point_interface.h:
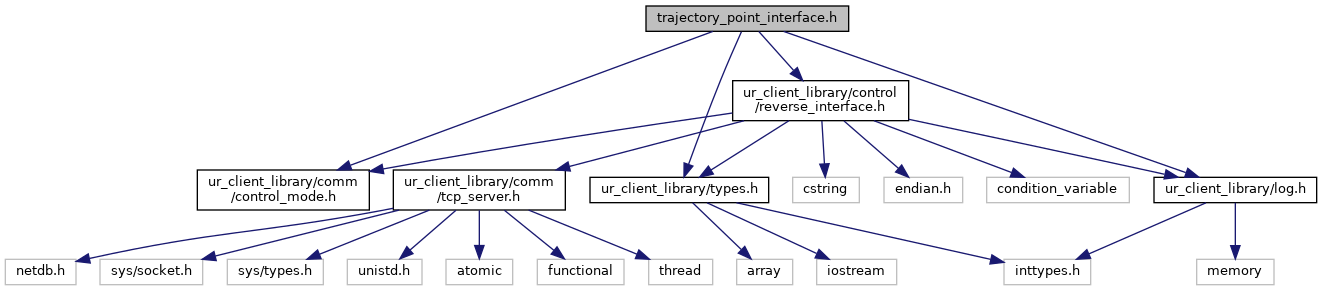
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | urcl::control::TrajectoryPointInterface |
| The TrajectoryPointInterface class handles trajectory forwarding to the robot. Full trajectories are forwarded to the robot controller and are executed there. More... | |
Namespaces | |
| urcl | |
| urcl::control | |
Enumerations | |
| enum | urcl::control::TrajectoryMotionType : int32_t { urcl::control::TrajectoryMotionType::JOINT_POINT = 0, urcl::control::TrajectoryMotionType::CARTESIAN_POINT = 1, urcl::control::TrajectoryMotionType::JOINT_POINT_SPLINE = 2 } |
| enum | urcl::control::TrajectoryResult : int32_t { urcl::control::TrajectoryResult::TRAJECTORY_RESULT_SUCCESS = 0, urcl::control::TrajectoryResult::TRAJECTORY_RESULT_CANCELED = 1, urcl::control::TrajectoryResult::TRAJECTORY_RESULT_FAILURE = 2 } |
| Types for encoding trajectory execution result. More... | |
| enum | urcl::control::TrajectorySplineType : int32_t { urcl::control::TrajectorySplineType::SPLINE_CUBIC = 1, urcl::control::TrajectorySplineType::SPLINE_QUINTIC = 2 } |
Detailed Description
- Date
- 2021-06-01
Definition in file trajectory_point_interface.h.