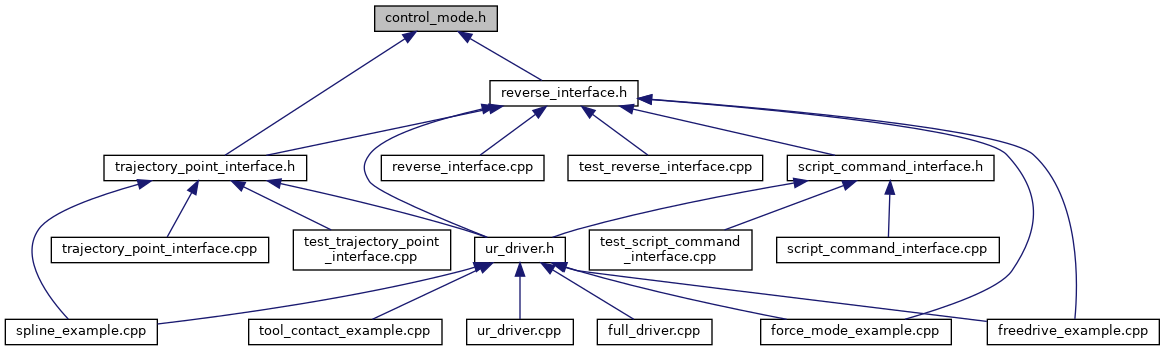
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| urcl | |
| urcl::comm | |
Enumerations | |
| enum | urcl::comm::ControlMode : int32_t { urcl::comm::ControlMode::MODE_STOPPED = -2, urcl::comm::ControlMode::MODE_UNINITIALIZED = -1, urcl::comm::ControlMode::MODE_IDLE = 0, urcl::comm::ControlMode::MODE_SERVOJ = 1, urcl::comm::ControlMode::MODE_SPEEDJ = 2, urcl::comm::ControlMode::MODE_FORWARD = 3, urcl::comm::ControlMode::MODE_SPEEDL = 4, urcl::comm::ControlMode::MODE_POSE = 5, urcl::comm::ControlMode::MODE_FREEDRIVE = 6, urcl::comm::ControlMode::MODE_TOOL_IN_CONTACT } |
| Control modes as interpreted from the script runnning on the robot. More... | |
Detailed Description
- Date
- 2021-06-01
Definition in file control_mode.h.