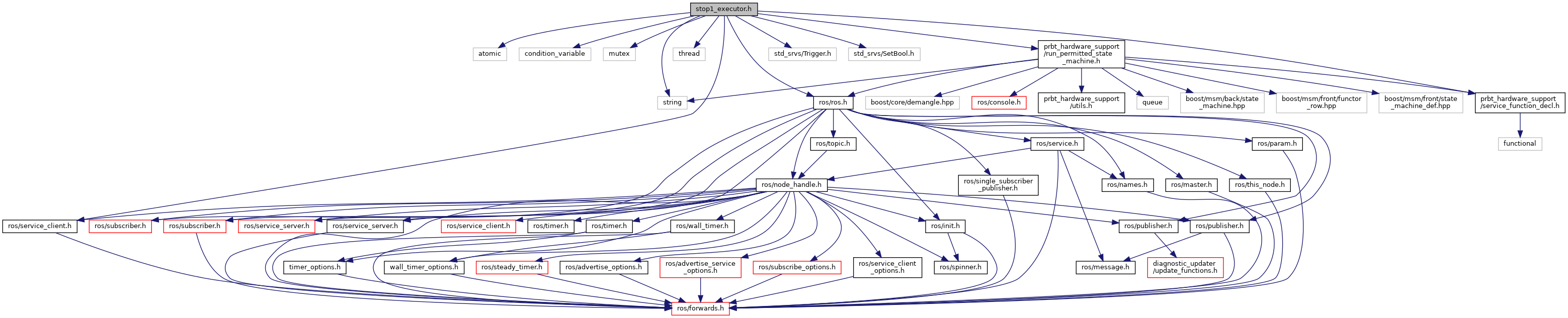
#include <atomic>#include <condition_variable>#include <mutex>#include <string>#include <thread>#include <ros/ros.h>#include <ros/service_client.h>#include <std_srvs/Trigger.h>#include <std_srvs/SetBool.h>#include <prbt_hardware_support/run_permitted_state_machine.h>#include <prbt_hardware_support/service_function_decl.h>
Include dependency graph for stop1_executor.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | prbt_hardware_support::Stop1Executor |
| Performs service calls for Stop1 and the respective reversal, that is enabling the manipulator. Incoming updates of the RUN_PERMITTED state are handled asynchronously. More... | |
Namespaces | |
| prbt_hardware_support | |