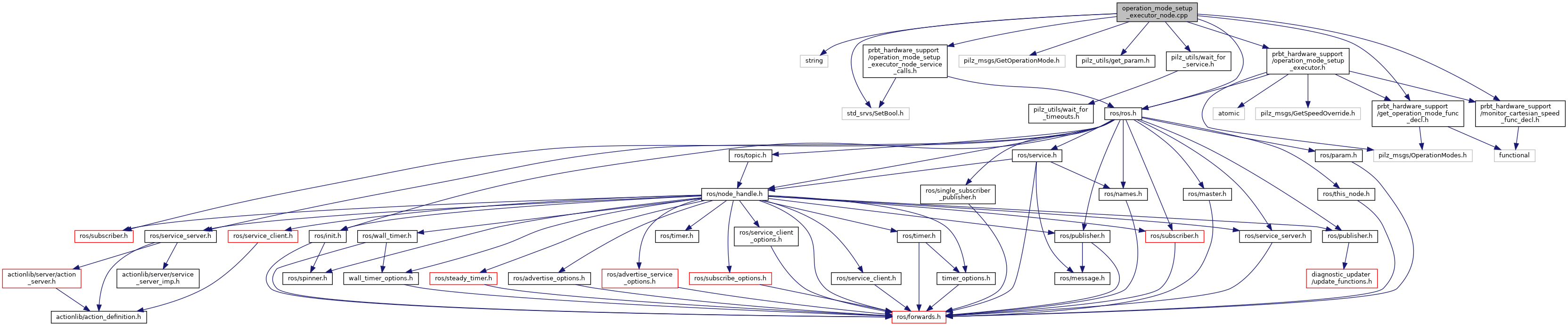
#include <string>#include <ros/ros.h>#include <std_srvs/SetBool.h>#include <pilz_msgs/GetOperationMode.h>#include <pilz_utils/get_param.h>#include <pilz_utils/wait_for_service.h>#include <prbt_hardware_support/operation_mode_setup_executor.h>#include <prbt_hardware_support/monitor_cartesian_speed_func_decl.h>#include <prbt_hardware_support/get_operation_mode_func_decl.h>#include <prbt_hardware_support/operation_mode_setup_executor_node_service_calls.h>
Include dependency graph for operation_mode_setup_executor_node.cpp:
Go to the source code of this file.
Functions | |
| int | main (int argc, char **argv) |
| Read necessary parameters, start and initialize the prbt_hardware_support::OperationModeSetupExecutor. More... | |
Variables | |
| static constexpr uint32_t | DEFAULT_QUEUE_SIZE { 10 } |
| static const std::string | GET_SPEED_OVERRIDE_SERVICE { "get_speed_override" } |
| static const std::string | MONITOR_CARTESIAN_SPEED_SERVICE |
| static const std::string | OPERATION_MODE_TOPIC { "operation_mode" } |
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Read necessary parameters, start and initialize the prbt_hardware_support::OperationModeSetupExecutor.
Definition at line 48 of file operation_mode_setup_executor_node.cpp.
Variable Documentation
◆ DEFAULT_QUEUE_SIZE
|
static |
Definition at line 39 of file operation_mode_setup_executor_node.cpp.
◆ GET_SPEED_OVERRIDE_SERVICE
|
static |
Definition at line 37 of file operation_mode_setup_executor_node.cpp.
◆ MONITOR_CARTESIAN_SPEED_SERVICE
|
static |
Initial value:
{ "manipulator_joint_trajectory_controller/"
"monitor_cartesian_speed" }
Definition at line 34 of file operation_mode_setup_executor_node.cpp.
◆ OPERATION_MODE_TOPIC
|
static |
Definition at line 36 of file operation_mode_setup_executor_node.cpp.