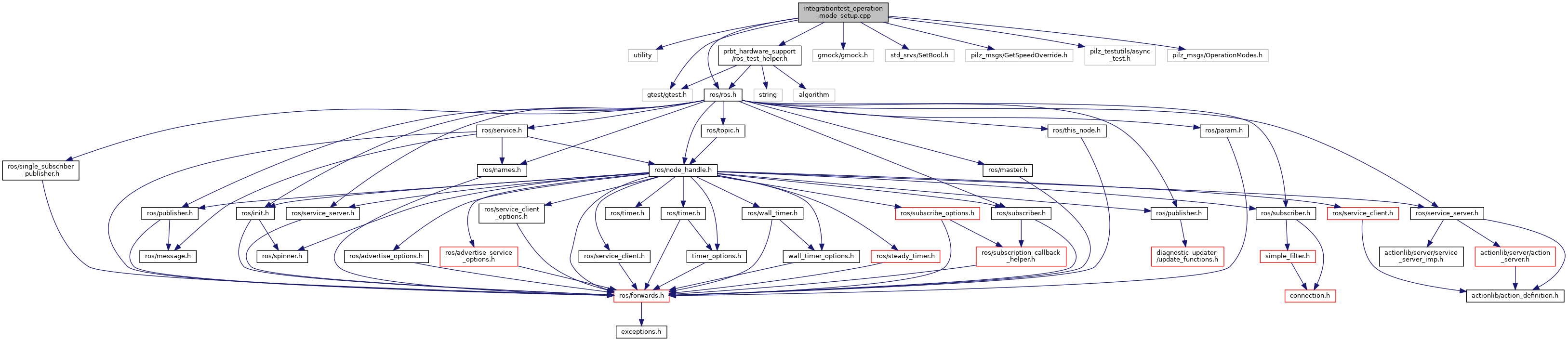
#include <utility>#include <gtest/gtest.h>#include <gmock/gmock.h>#include <ros/ros.h>#include <std_srvs/SetBool.h>#include <pilz_msgs/GetSpeedOverride.h>#include <pilz_testutils/async_test.h>#include <pilz_msgs/OperationModes.h>#include <prbt_hardware_support/ros_test_helper.h>
Include dependency graph for integrationtest_operation_mode_setup.cpp:
Go to the source code of this file.
Classes | |
| class | prbt_hardware_support::ControllerMock |
| Provides the monitor_cartesian_speed service. More... | |
| class | prbt_hardware_support::OperationModeSetupTest |
| Test the operation_mode_setup_executor_node. More... | |
| struct | prbt_hardware_support::TestData |
Namespaces | |
| prbt_hardware_support | |
Functions | |
| prbt_hardware_support::INSTANTIATE_TEST_CASE_P (TestActivationOfSpeedMonitoring, OperationModeSetupTest, testing::Values(OP_MODE_AUTO_TEST_DATA, OP_MODE_T1_TEST_DATA),) | |
| int | main (int argc, char *argv[]) |
| prbt_hardware_support::TEST_P (OperationModeSetupTest, testSpeedMonitoringActivation) | |
| Tests that the Cartesian speed monitoring is activated or de-activated depending on the operation mode. More... | |
Variables | |
| static constexpr uint32_t | prbt_hardware_support::DEFAULT_QUEUE_SIZE { 10 } |
| static constexpr double | prbt_hardware_support::EXPECTED_SPEED_OVERRIDE_AUTO { 1.0 } |
| static constexpr double | prbt_hardware_support::EXPECTED_SPEED_OVERRIDE_T1 { 0.1 } |
| static const std::string | prbt_hardware_support::GET_SPEED_OVERRIDE_SERVICE { "get_speed_override" } |
| static const std::string | prbt_hardware_support::MONITOR_CARTESIAN_SPEED_CALLBACK_EVENT { "monitor_cartesian_speed_callback_event" } |
| static const std::string | prbt_hardware_support::MONITOR_CARTESIAN_SPEED_SERVICE |
| static constexpr TestData | prbt_hardware_support::OP_MODE_AUTO_TEST_DATA |
| static constexpr TestData | prbt_hardware_support::OP_MODE_T1_TEST_DATA { pilz_msgs::OperationModes::T1, true, EXPECTED_SPEED_OVERRIDE_T1 } |
| static const std::string | prbt_hardware_support::OPERATION_MODE_TOPIC { "operation_mode" } |
| static const std::string | prbt_hardware_support::OPERATON_MODE_SETUP_EXECUTOR_NODE_NAME { "/operation_mode_setup_executor_node" } |
Function Documentation
◆ main()
| int main | ( | int | argc, |
| char * | argv[] | ||
| ) |
Definition at line 175 of file integrationtest_operation_mode_setup.cpp.