#include <sensor_msgs/PointCloud2.h>#include <pcl_conversions/pcl_conversions.h>#include "pf_driver/PFR2300Header.h"#include "pf_driver/ros/point_cloud_publisher.h"
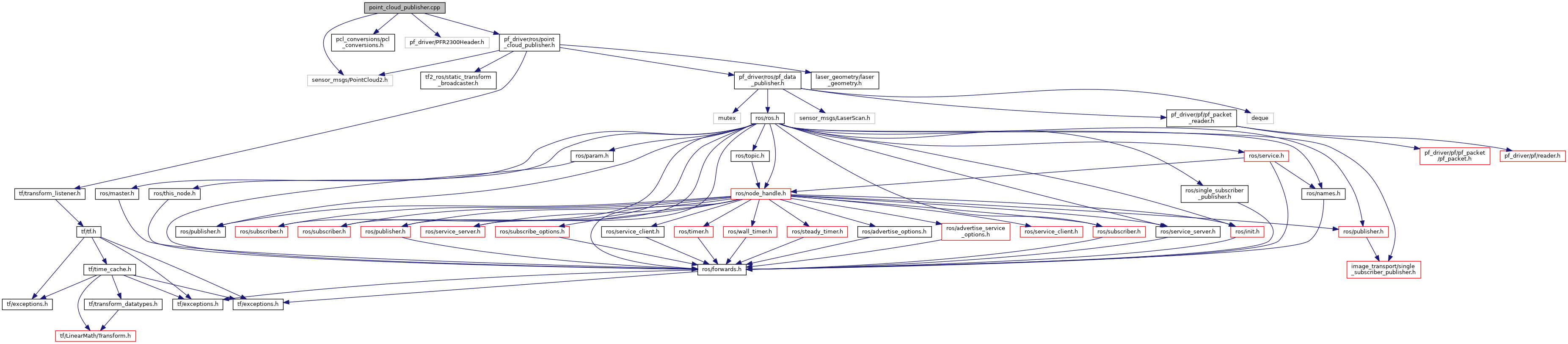
Include dependency graph for point_cloud_publisher.cpp:
#include <sensor_msgs/PointCloud2.h>#include <pcl_conversions/pcl_conversions.h>#include "pf_driver/PFR2300Header.h"#include "pf_driver/ros/point_cloud_publisher.h"