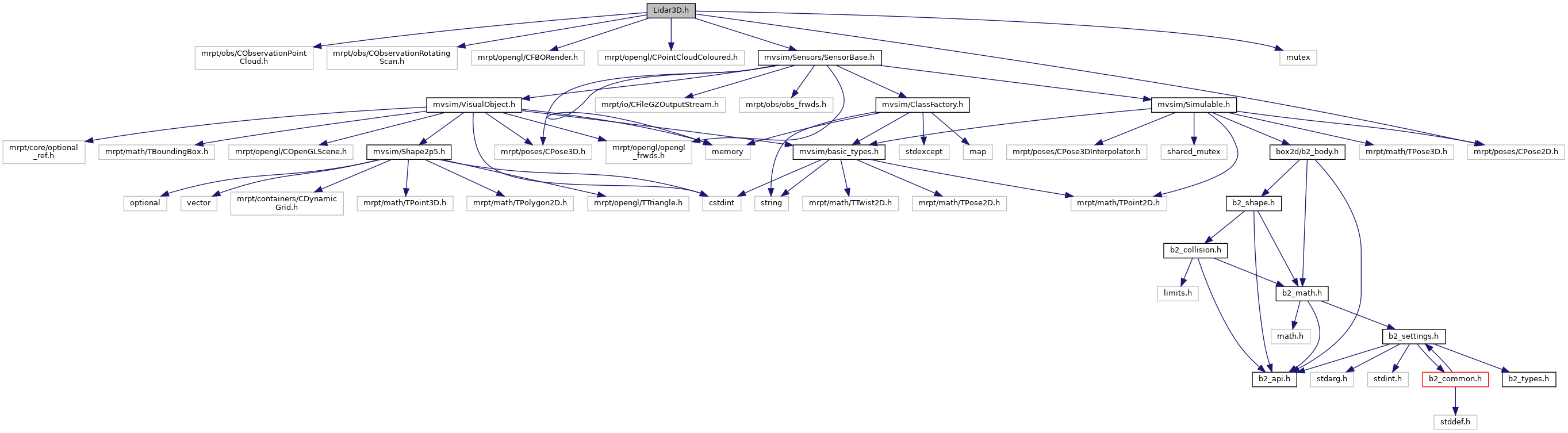
#include <mrpt/obs/CObservationPointCloud.h>#include <mrpt/obs/CObservationRotatingScan.h>#include <mrpt/opengl/CFBORender.h>#include <mrpt/opengl/CPointCloudColoured.h>#include <mrpt/poses/CPose2D.h>#include <mvsim/Sensors/SensorBase.h>#include <mutex>
Include dependency graph for Lidar3D.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | mvsim::Lidar3D |
| A 3D LiDAR sensor, with 360 degrees horizontal fielf-of-view, and a configurable vertical FOV. The number of rays in the vertical FOV and the number of samples in each horizontal row are configurable. More... | |
| struct | mvsim::Lidar3D::PerHorzAngleLUT |
| struct | mvsim::Lidar3D::PerRayLUT |
Namespaces | |
| mvsim | |