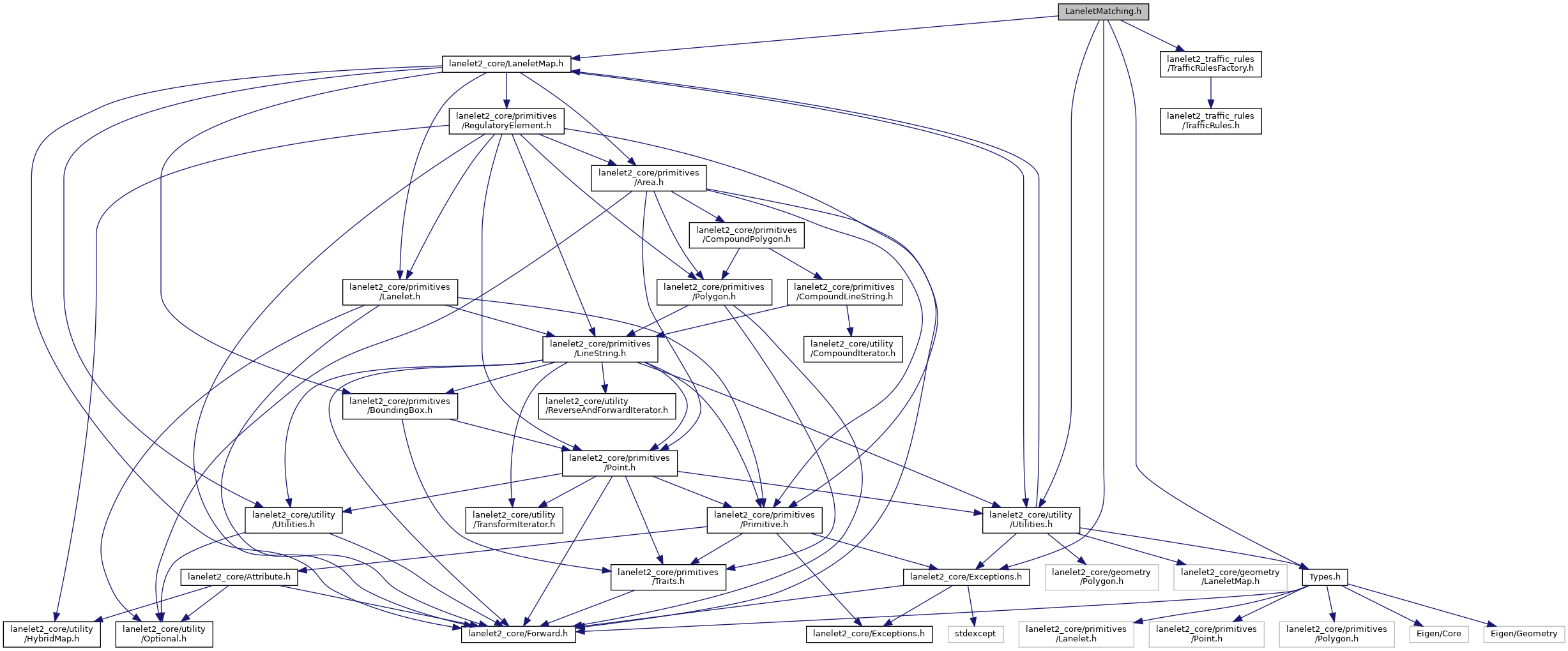
#include <lanelet2_core/LaneletMap.h>#include <lanelet2_traffic_rules/TrafficRulesFactory.h>#include "Exceptions.h"#include "Types.h"#include "Utilities.h"
Include dependency graph for LaneletMatching.h:
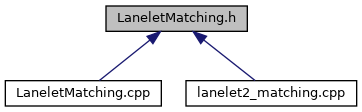
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| lanelet | |
| lanelet::matching | |
Functions | |
| std::vector< LaneletMatch > | lanelet::matching::getDeterministicMatches (LaneletMap &map, const Object2d &obj, double maxDist) |
| get deterministic lanelet matches of an object with a maximum distance of maxDist, sorted ascending by distance More... | |
| std::vector< ConstLaneletMatch > | lanelet::matching::getDeterministicMatches (const LaneletMap &map, const Object2d &obj, double maxDist) |
| std::vector< LaneletMatchProbabilistic > | lanelet::matching::getProbabilisticMatches (LaneletMap &map, const ObjectWithCovariance2d &obj, double maxDist) |
| get probabilistic lanelet matches of an object with a maximum deterministic euler distance of maxDist, sorted ascending by Mahalanobis distance More... | |
| std::vector< ConstLaneletMatchProbabilistic > | lanelet::matching::getProbabilisticMatches (const LaneletMap &map, const ObjectWithCovariance2d &obj, double maxDist) |
| template<typename LayerT > | |
| bool | lanelet::matching::isCloseTo (const LayerT &map, const Object2d &obj, double maxDist) |
| Determine whether an object is within a maximum distance to any primitive of the layer. More... | |
| template<typename LayerT > | |
| bool | lanelet::matching::isWithin (const LayerT &map, const Object2d &obj) |
| Determine whether an object is (at least partially) within any primitive of the layer. More... | |
| template<typename MatchVectorT > | |
| MatchVectorT | lanelet::matching::removeNonRuleCompliantMatches (const MatchVectorT &matches, const lanelet::traffic_rules::TrafficRulesPtr &trafficRulesPtr) |
| Remove non traffic rule compliant probabilistic lanelet matches. More... | |