common code between lago.* (2D) and InitializePose3.* (3D) More...
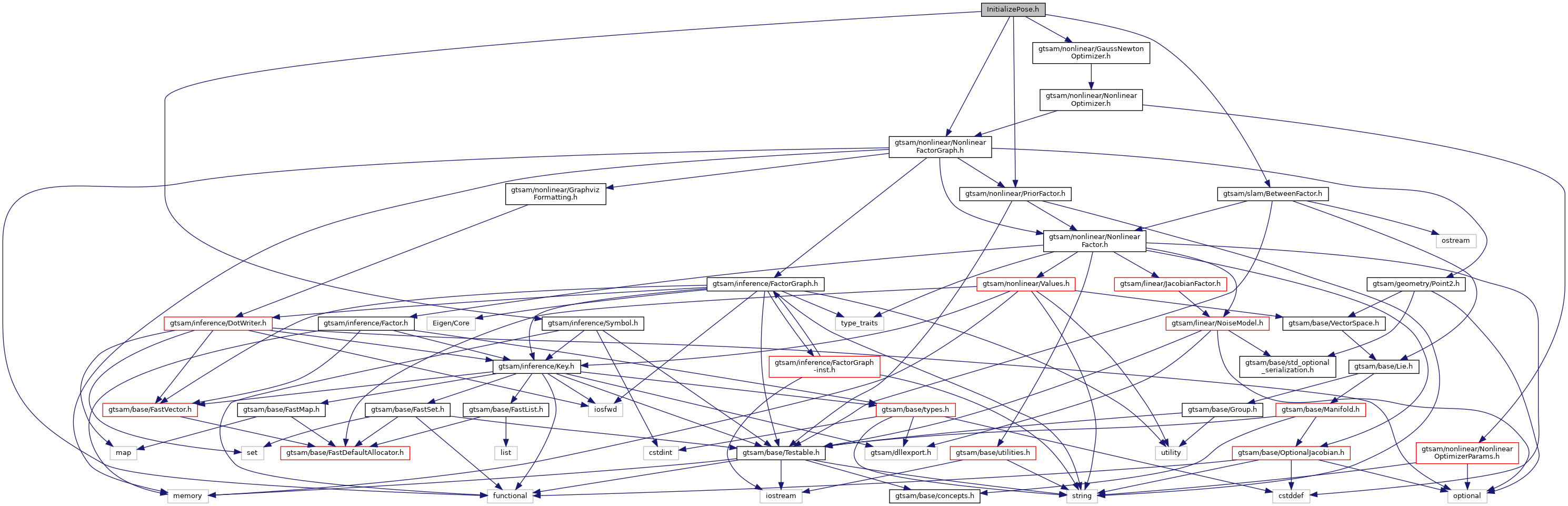
#include <gtsam/inference/Symbol.h>#include <gtsam/nonlinear/GaussNewtonOptimizer.h>#include <gtsam/nonlinear/NonlinearFactorGraph.h>#include <gtsam/nonlinear/PriorFactor.h>#include <gtsam/slam/BetweenFactor.h>
Include dependency graph for InitializePose.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| gtsam | |
| traits | |
| gtsam::initialize | |
Functions | |
| template<class Pose > | |
| static NonlinearFactorGraph | gtsam::initialize::buildPoseGraph (const NonlinearFactorGraph &graph) |
| template<class Pose > | |
| static Values | gtsam::initialize::computePoses (const Values &initialRot, NonlinearFactorGraph *posegraph, bool singleIter=true) |
Variables | |
| static constexpr Key | gtsam::initialize::kAnchorKey = 99999999 |
Detailed Description
common code between lago.* (2D) and InitializePose3.* (3D)
- Date
- August, 2020
Definition in file InitializePose.h.