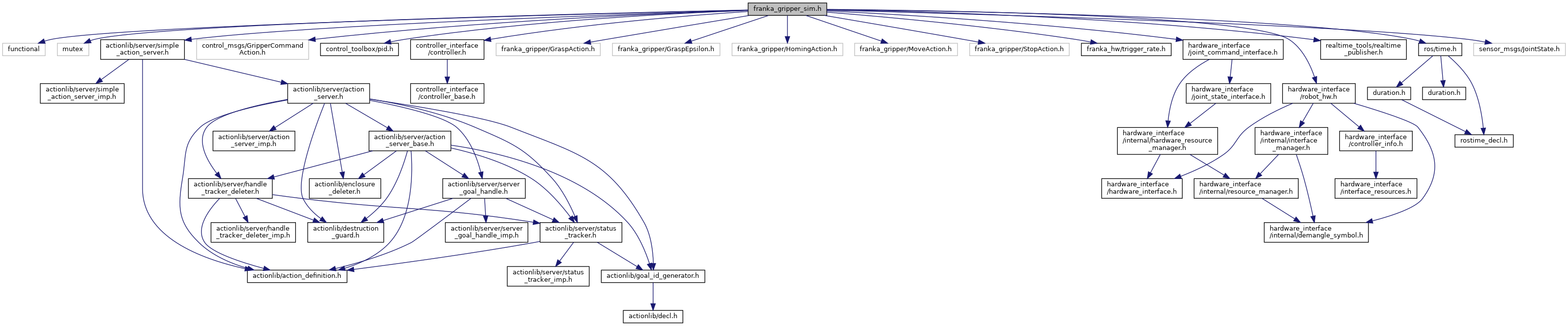
#include <functional>#include <mutex>#include <actionlib/server/simple_action_server.h>#include <control_msgs/GripperCommandAction.h>#include <control_toolbox/pid.h>#include <controller_interface/controller.h>#include <franka_gripper/GraspAction.h>#include <franka_gripper/GraspEpsilon.h>#include <franka_gripper/HomingAction.h>#include <franka_gripper/MoveAction.h>#include <franka_gripper/StopAction.h>#include <franka_hw/trigger_rate.h>#include <hardware_interface/joint_command_interface.h>#include <hardware_interface/robot_hw.h>#include <realtime_tools/realtime_publisher.h>#include <ros/time.h>#include <sensor_msgs/JointState.h>
Include dependency graph for franka_gripper_sim.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | franka_gazebo::FrankaGripperSim::Config |
| class | franka_gazebo::FrankaGripperSim |
| Simulate the franka_gripper_node. More... | |
Namespaces | |
| franka_gazebo | |
Variables | |
| const double | franka_gazebo::kDefaultGripperActionSpeed = 0.1 |
| How fast shall the gripper execute gripper command actions? [m/s]. More... | |
| const double | franka_gazebo::kDefaultGripperActionWidthTolerance = 0.005 |
| When width between fingers is below this, the gripper action succeeds [m]. More... | |
| const double | franka_gazebo::kDefaultMoveWidthTolerance = 0.001 |
| When width between fingers is below this, the move action succeeds [m]. More... | |
| const int | franka_gazebo::kGraspConsecutiveSamples = 10 |
| How many times the speed has to drop below resting threshold before the grasping will be checked. More... | |
| const double | franka_gazebo::kGraspRestingThreshold = 0.003 |
| Below which speed the target width should be checked to abort or succeed the grasp action [m/s]. More... | |
| const double | franka_gazebo::kMaxFingerWidth = 0.08 |