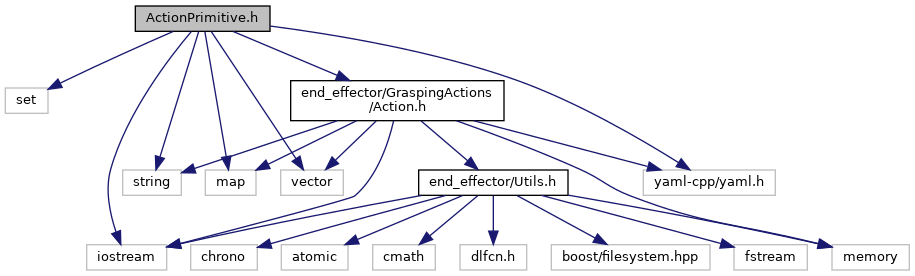
#include <set>#include <string>#include <map>#include <vector>#include <iostream>#include <end_effector/GraspingActions/Action.h>#include <yaml-cpp/yaml.h>
Include dependency graph for ActionPrimitive.h:
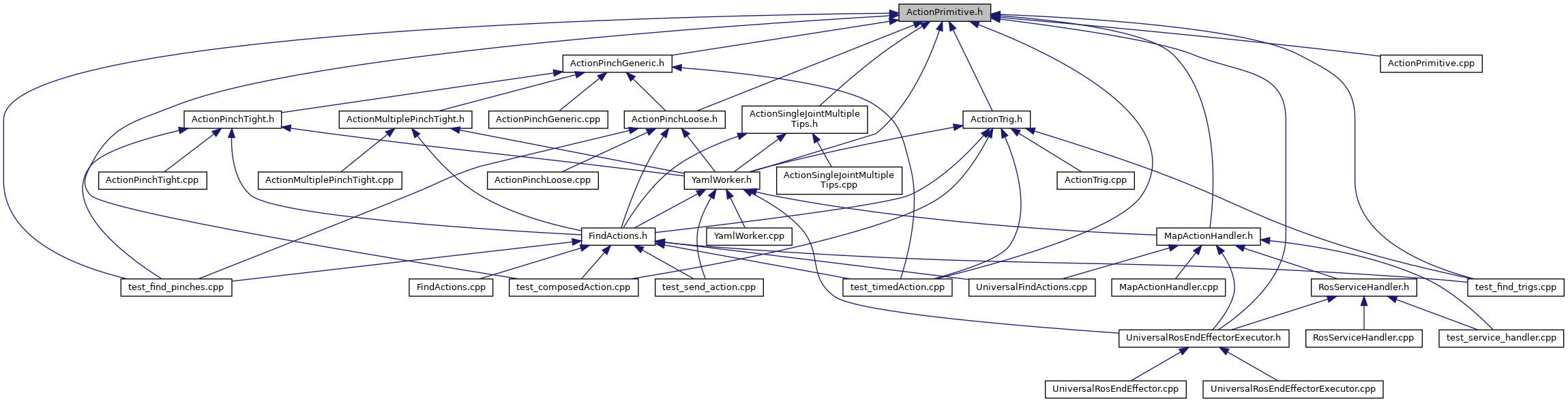
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | ROSEE::ActionPrimitive |
| Virtual class, Base of all the primitive actions. It has some implemented functions that a derived class can use, if you don't want to override to make them more action-specific. All the primitives are defined by: More... | |
Namespaces | |
| ROSEE | |