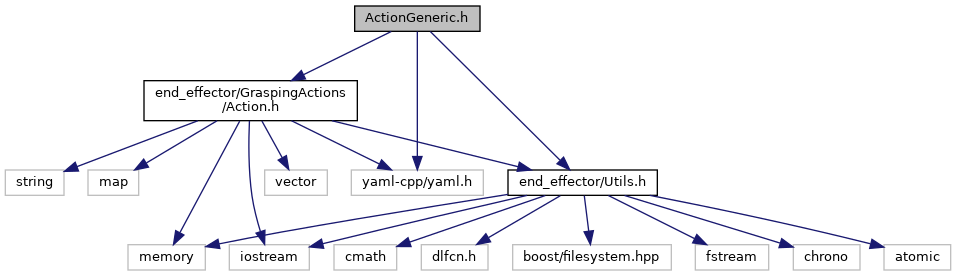
#include <end_effector/GraspingActions/Action.h>#include <yaml-cpp/yaml.h>#include <end_effector/Utils.h>
Include dependency graph for ActionGeneric.h:
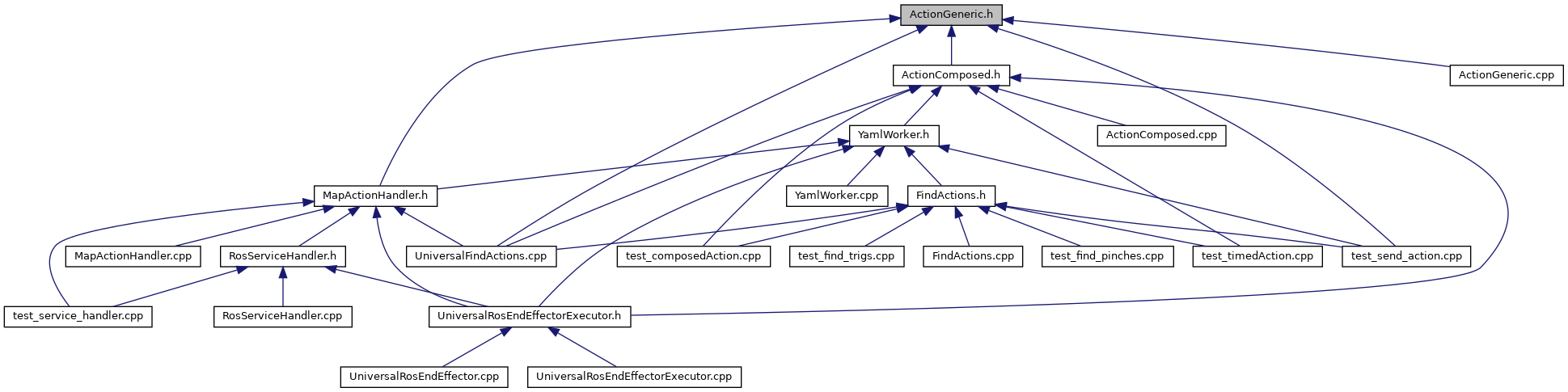
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | ROSEE::ActionGeneric |
| Class to handle a generic, simple action. Differently from other class, this is easily creable manually, for ex giving a name and a JointPos map to the costructor. It contains essential infos about the action, and override the necessary pure virtual functions of base class Action. More... | |
Namespaces | |
| ROSEE | |