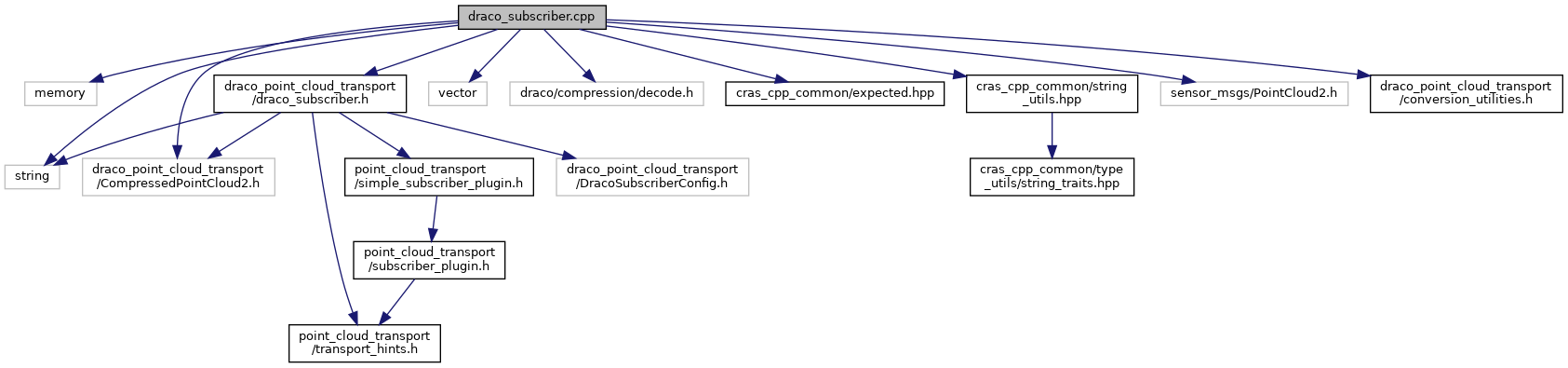
#include <memory>#include <string>#include <vector>#include <draco/compression/decode.h>#include <cras_cpp_common/expected.hpp>#include <cras_cpp_common/string_utils.hpp>#include <sensor_msgs/PointCloud2.h>#include <draco_point_cloud_transport/CompressedPointCloud2.h>#include <draco_point_cloud_transport/conversion_utilities.h>#include <draco_point_cloud_transport/draco_subscriber.h>
Include dependency graph for draco_subscriber.cpp:
Go to the source code of this file.
Namespaces | |
| draco_point_cloud_transport | |
Functions | |
| cras::expected< bool, std::string > | draco_point_cloud_transport::convertDracoToPC2 (const draco::PointCloud &pc, const draco_point_cloud_transport::CompressedPointCloud2 &compressed_PC2, sensor_msgs::PointCloud2 &PC2) |
| Method for converting into sensor_msgs::PointCloud2. More... | |