#include <corbo-optimal-control/functions/final_state_constraints.h>#include <corbo-optimal-control/functions/final_state_cost.h>#include <corbo-optimal-control/functions/hybrid_cost.h>#include <corbo-optimal-control/functions/minimum_time.h>#include <corbo-optimal-control/functions/quadratic_control_cost.h>#include <corbo-optimal-control/functions/quadratic_cost.h>#include <corbo-optimal-control/functions/quadratic_state_cost.h>#include <corbo-optimal-control/structured_ocp/discretization_grids/finite_differences_grid.h>#include <corbo-optimal-control/structured_ocp/discretization_grids/finite_differences_grid_move_blocking.h>#include <corbo-optimal-control/structured_ocp/discretization_grids/finite_differences_variable_grid.h>#include <corbo-optimal-control/structured_ocp/discretization_grids/multiple_shooting_grid.h>#include <corbo-optimal-control/structured_ocp/discretization_grids/multiple_shooting_variable_grid.h>#include <corbo-optimal-control/structured_ocp/discretization_grids/non_uniform_finite_differences_variable_grid.h>#include <corbo-optimal-control/structured_ocp/discretization_grids/non_uniform_multiple_shooting_variable_grid.h>#include <corbo-optimal-control/structured_ocp/structured_optimal_control_problem.h>
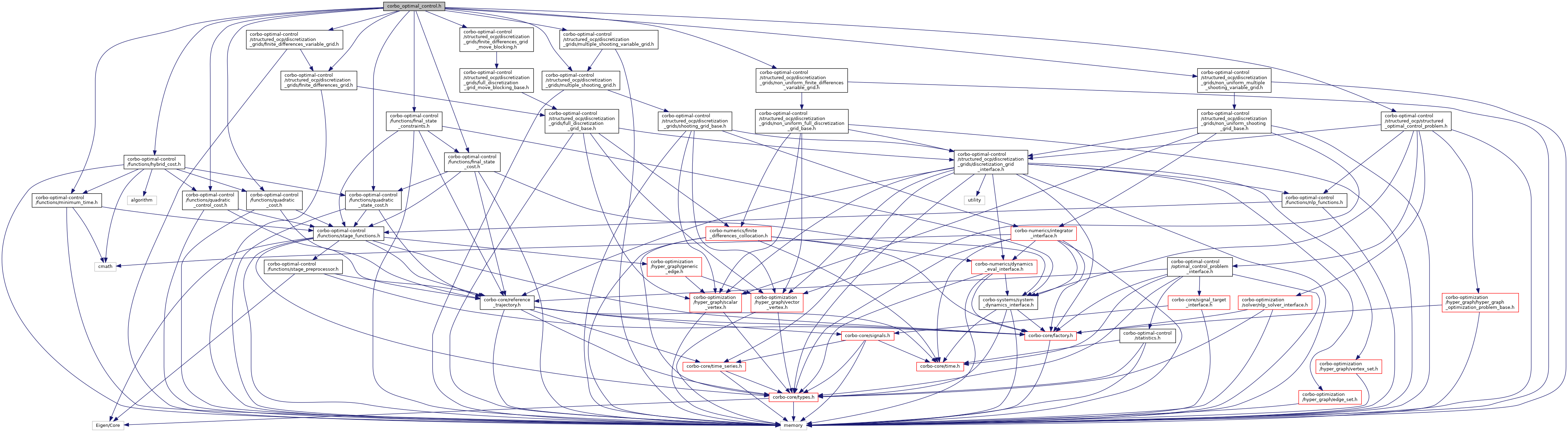
Include dependency graph for corbo_optimal_control.h:
This graph shows which files directly or indirectly include this file: