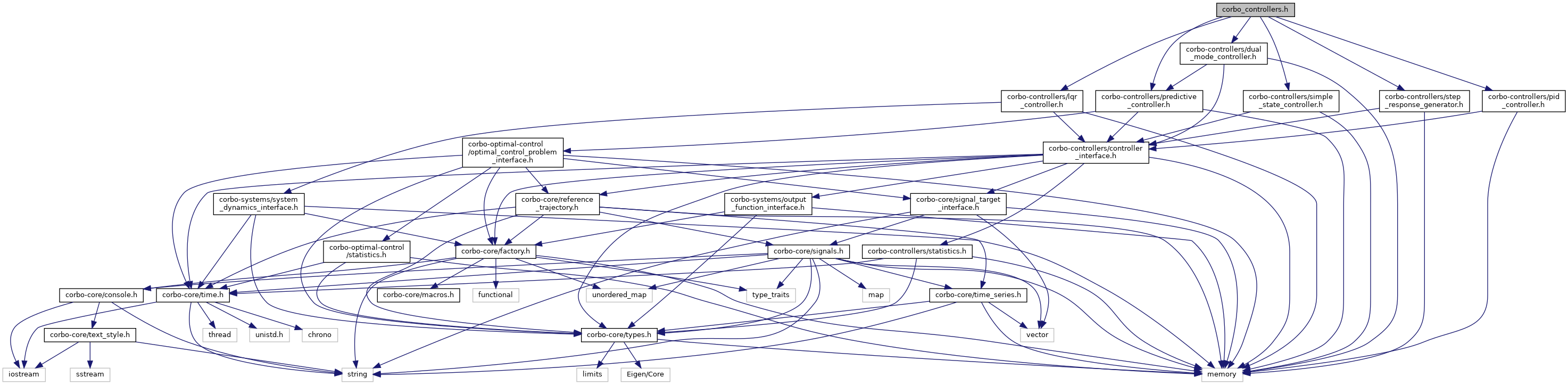
#include <corbo-controllers/dual_mode_controller.h>#include <corbo-controllers/lqr_controller.h>#include <corbo-controllers/pid_controller.h>#include <corbo-controllers/predictive_controller.h>#include <corbo-controllers/simple_state_controller.h>#include <corbo-controllers/step_response_generator.h>
Include dependency graph for corbo_controllers.h:
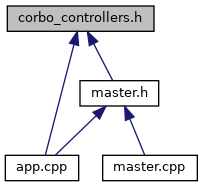
This graph shows which files directly or indirectly include this file: