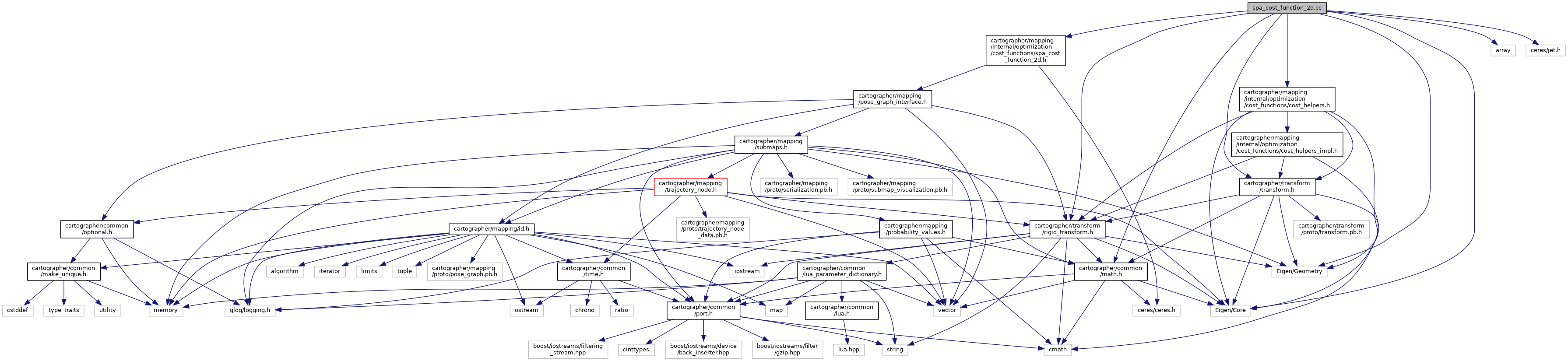
#include "cartographer/mapping/internal/optimization/cost_functions/spa_cost_function_2d.h"#include <array>#include "Eigen/Core"#include "Eigen/Geometry"#include "cartographer/common/math.h"#include "cartographer/mapping/internal/optimization/cost_functions/cost_helpers.h"#include "cartographer/transform/rigid_transform.h"#include "cartographer/transform/transform.h"#include "ceres/jet.h"
Include dependency graph for spa_cost_function_2d.cc:
Go to the source code of this file.
Namespaces | |
| cartographer | |
| cartographer::mapping | |
| cartographer::mapping::optimization | |
Functions | |
| ceres::CostFunction * | cartographer::mapping::optimization::CreateAnalyticalSpaCostFunction (const PoseGraphInterface::Constraint::Pose &observed_relative_pose) |
| ceres::CostFunction * | cartographer::mapping::optimization::CreateAutoDiffSpaCostFunction (const PoseGraphInterface::Constraint::Pose &observed_relative_pose) |
Variable Documentation
◆ observed_relative_pose_
|
private |
Definition at line 54 of file spa_cost_function_2d.cc.
◆ rotation_weight_
|
private |
Definition at line 130 of file spa_cost_function_2d.cc.
◆ translation_weight_
|
private |
Definition at line 129 of file spa_cost_function_2d.cc.