#include <actionlib_msgs/GoalID.h>#include <actionlib_msgs/GoalStatus.h>#include <actionlib/action_definition.h>#include <actionlib/server/status_tracker.h>#include <actionlib/destruction_guard.h>#include <boost/shared_ptr.hpp>#include <list>#include <string>#include <actionlib/server/server_goal_handle_imp.h>
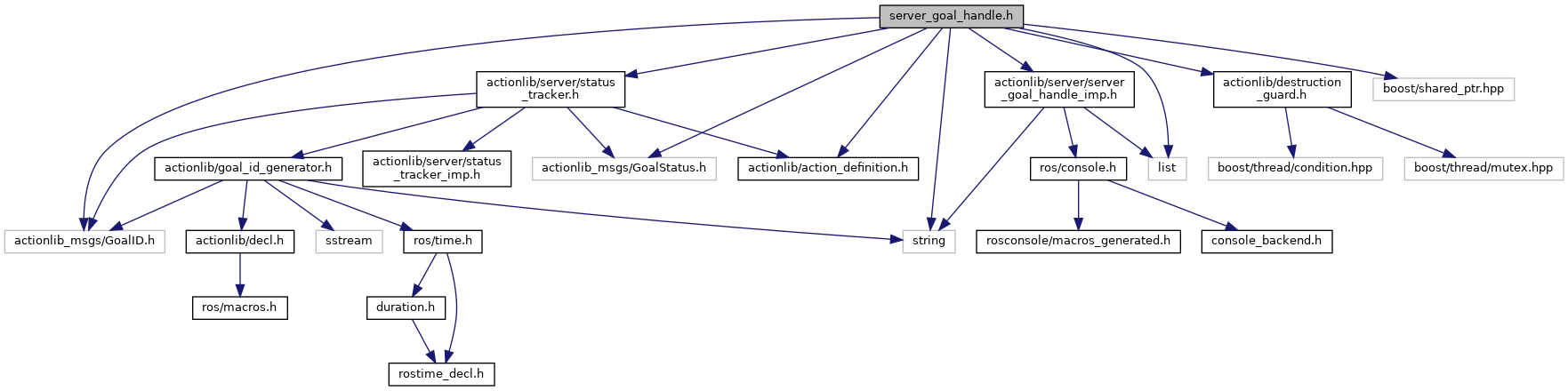
Include dependency graph for server_goal_handle.h:
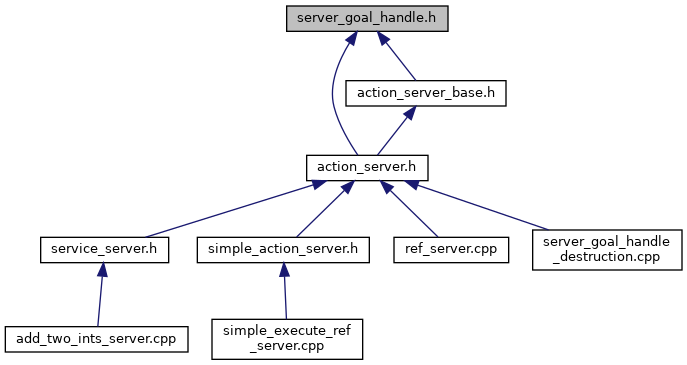
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | actionlib::ActionServerBase< ActionSpec > |
| The ActionServerBase implements the logic for an ActionServer. More... | |
| class | actionlib::ServerGoalHandle< ActionSpec > |
| Encapsulates a state machine for a given goal that the user can trigger transitions on. All ROS interfaces for the goal are managed by the ActionServer to lessen the burden on the user. More... | |
Namespaces | |
| actionlib | |