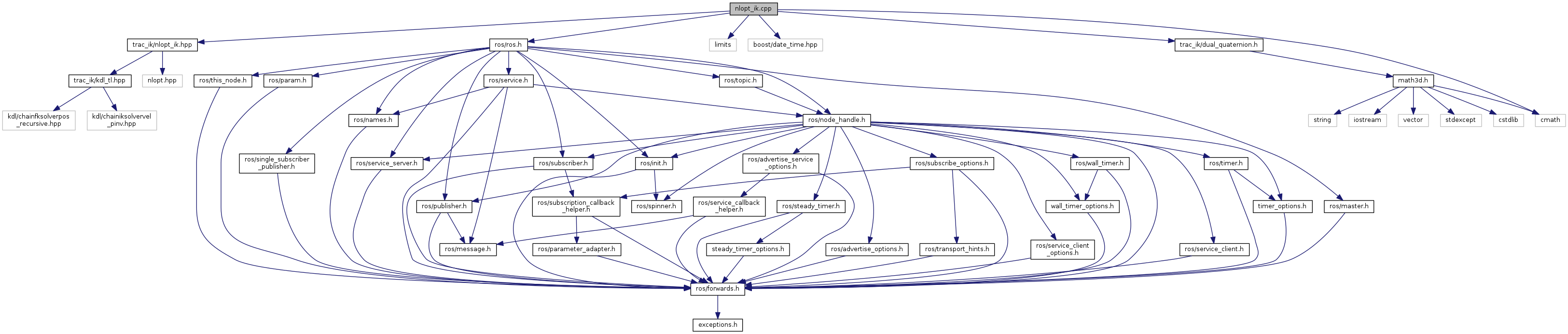
#include <trac_ik/nlopt_ik.hpp>
#include <ros/ros.h>
#include <limits>
#include <boost/date_time.hpp>
#include <trac_ik/dual_quaternion.h>
#include <cmath>
Go to the source code of this file.
|
| void | NLOPT_IK::constrainfuncm (uint m, double *result, uint n, const double *x, double *grad, void *data) |
| |
| double | NLOPT_IK::minfunc (const std::vector< double > &x, std::vector< double > &grad, void *data) |
| |
| double | NLOPT_IK::minfuncDQ (const std::vector< double > &x, std::vector< double > &grad, void *data) |
| |
| double | NLOPT_IK::minfuncL2 (const std::vector< double > &x, std::vector< double > &grad, void *data) |
| |
| double | NLOPT_IK::minfuncSumSquared (const std::vector< double > &x, std::vector< double > &grad, void *data) |
| |