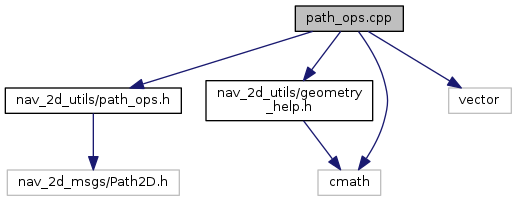
#include <nav_2d_utils/path_ops.h>
#include <nav_2d_utils/geometry_help.h>
#include <cmath>
#include <vector>
Go to the source code of this file.
|
| void | nav_2d_utils::addPose (nav_2d_msgs::Path2D &path, double x, double y, double theta=0.0) |
| | Convenience function to add a pose to a path in one line. More...
|
| |
| nav_2d_msgs::Path2D | nav_2d_utils::adjustPlanResolution (const nav_2d_msgs::Path2D &global_plan_in, double resolution) |
| | Increase plan resolution to match that of the costmap by adding points linearly between points. More...
|
| |
| nav_2d_msgs::Path2D | nav_2d_utils::compressPlan (const nav_2d_msgs::Path2D &input_path, double epsilon=0.1) |
| | Decrease the length of the plan by eliminating colinear points. More...
|
| |
| PoseList | nav_2d_utils::compressPlan (const PoseList &input, unsigned int start_index, unsigned int end_index, double epsilon) |
| | Helper function for other version of compressPlan. More...
|
| |
| double | nav_2d_utils::getPlanLength (const nav_2d_msgs::Path2D &plan, const unsigned int start_index=0) |
| | Calculate the length of the plan, starting from the given index. More...
|
| |
| double | nav_2d_utils::getPlanLength (const nav_2d_msgs::Path2D &plan, const geometry_msgs::Pose2D &query_pose) |
| | Calculate the length of the plan from the pose on the plan closest to the given pose. More...
|
| |
| double | nav_2d_utils::poseDistance (const geometry_msgs::Pose2D &pose0, const geometry_msgs::Pose2D &pose1) |
| | Calculate the linear distance between two poses. More...
|
| |