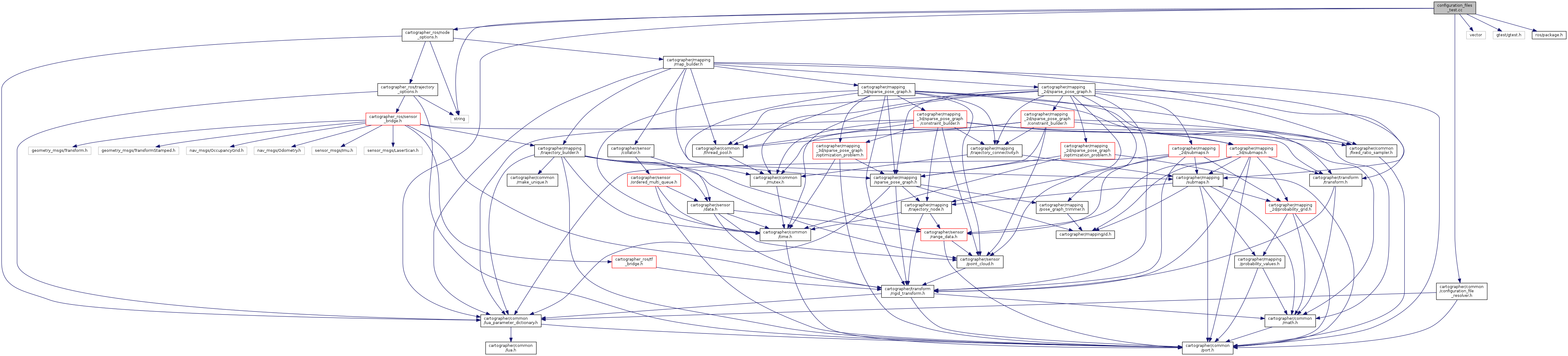
#include <string>#include <vector>#include "cartographer/common/configuration_file_resolver.h"#include "cartographer/common/lua_parameter_dictionary.h"#include "cartographer_ros/node_options.h"#include "gtest/gtest.h"#include "ros/package.h"
Include dependency graph for configuration_files_test.cc:
Go to the source code of this file.
Namespaces | |
| cartographer_ros | |