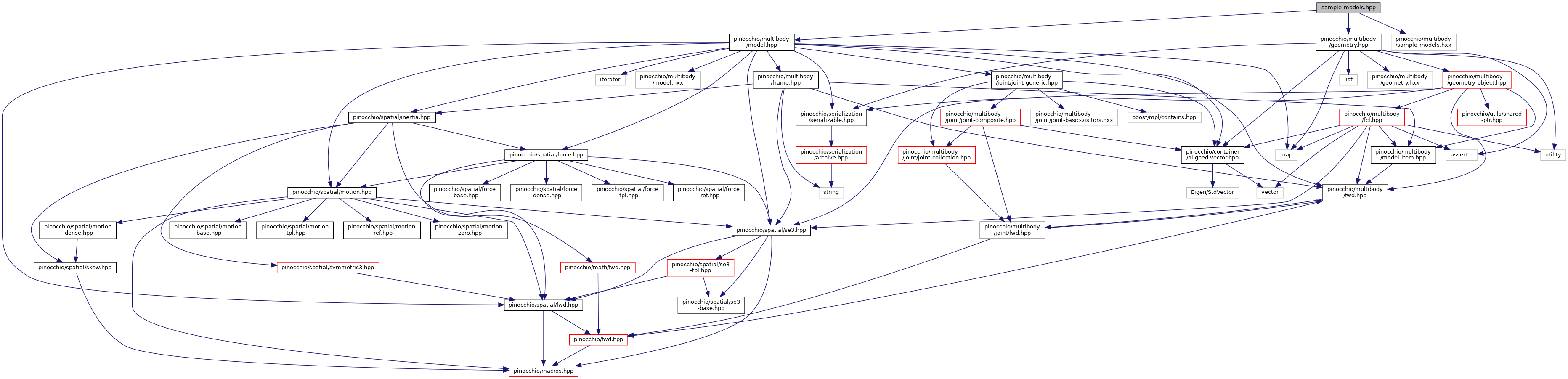
#include "pinocchio/multibody/model.hpp"#include "pinocchio/multibody/geometry.hpp"#include "pinocchio/multibody/sample-models.hxx"
Include dependency graph for multibody/sample-models.hpp:
Go to the source code of this file.
Namespaces | |
| pinocchio | |
| Main pinocchio namespace. | |
| pinocchio::buildModels | |
| Build simple models. | |
Functions | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| void | pinocchio::buildModels::humanoid (ModelTpl< Scalar, Options, JointCollectionTpl > &model, bool usingFF=true) |
| Create a 28-DOF kinematic chain of a floating humanoid robot. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| void | pinocchio::buildModels::humanoidRandom (ModelTpl< Scalar, Options, JointCollectionTpl > &model, bool usingFF=true) |
| Create a humanoid kinematic tree with 6-DOF limbs and random joint placements. More... | |
| template<typename Scalar , int Options, template< typename, int > class JointCollectionTpl> | |
| void | pinocchio::buildModels::manipulator (ModelTpl< Scalar, Options, JointCollectionTpl > &model) |
| Create a 6-DOF kinematic chain shoulder-elbow-wrist. More... | |