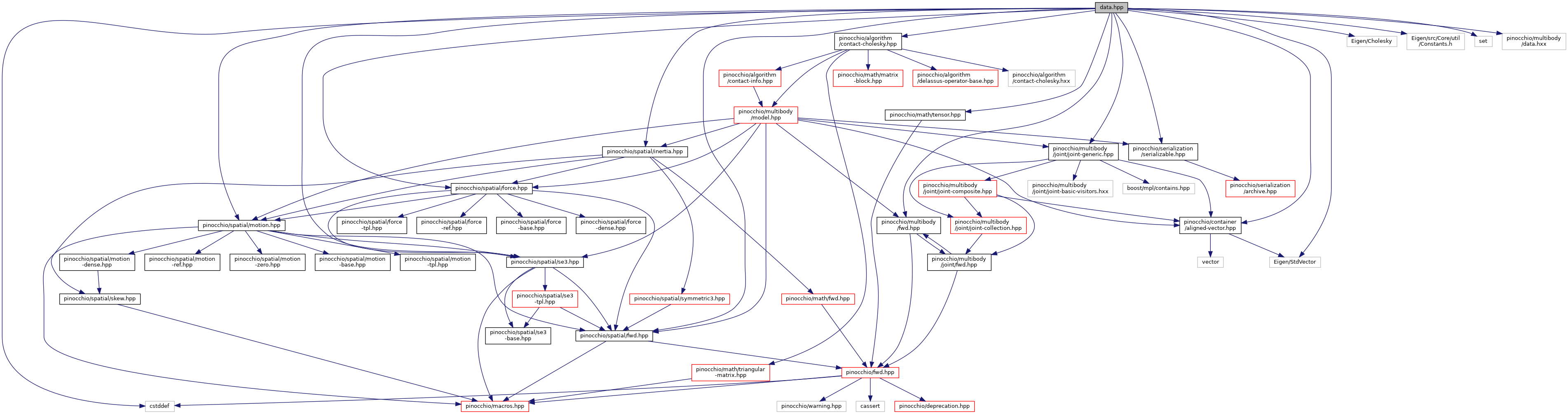
#include "pinocchio/spatial/fwd.hpp"#include "pinocchio/math/tensor.hpp"#include "pinocchio/spatial/se3.hpp"#include "pinocchio/spatial/force.hpp"#include "pinocchio/spatial/motion.hpp"#include "pinocchio/spatial/inertia.hpp"#include "pinocchio/multibody/fwd.hpp"#include "pinocchio/multibody/joint/joint-generic.hpp"#include "pinocchio/container/aligned-vector.hpp"#include "pinocchio/algorithm/contact-cholesky.hpp"#include "pinocchio/serialization/serializable.hpp"#include <Eigen/Cholesky>#include <Eigen/StdVector>#include <Eigen/src/Core/util/Constants.h>#include <cstddef>#include <set>#include "pinocchio/multibody/data.hxx"
Include dependency graph for multibody/data.hpp:
Go to the source code of this file.
Classes | |
| struct | pinocchio::DataTpl< _Scalar, _Options, JointCollectionTpl > |
| struct | pinocchio::traits< DataTpl< _Scalar, _Options, JointCollectionTpl > > |
Namespaces | |
| pinocchio | |
| Main pinocchio namespace. | |