#include "pinocchio/algorithm/jacobian.hpp"
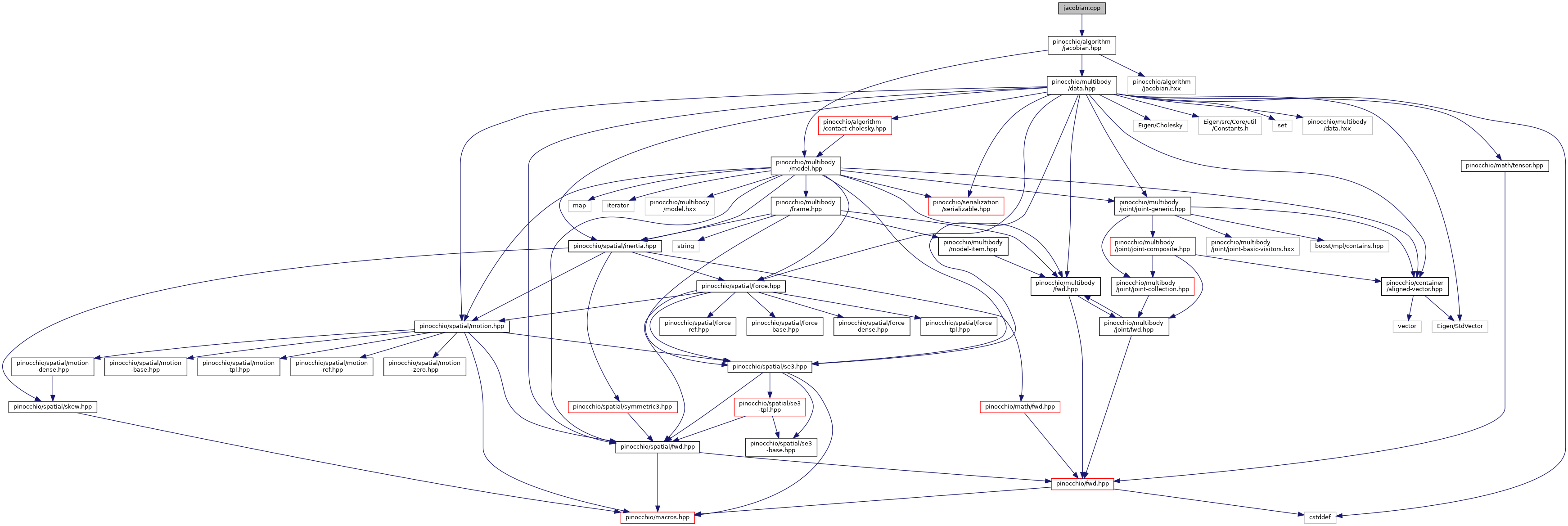
Include dependency graph for jacobian.cpp:
Go to the source code of this file.
Namespaces | |
| pinocchio | |
| Main pinocchio namespace. | |
| pinocchio::impl | |
Functions | |
| template const PINOCCHIO_EXPLICIT_INSTANTIATION_DEFINITION_DLLAPI context::Matrix6xs & | pinocchio::computeJointJacobians< context::Scalar, context::Options, JointCollectionDefaultTpl > (const context::Model &, context::Data &) |
| template const PINOCCHIO_EXPLICIT_INSTANTIATION_DEFINITION_DLLAPI context::Matrix6xs & | pinocchio::impl::computeJointJacobians< context::Scalar, context::Options, JointCollectionDefaultTpl, Eigen::Ref< const context::VectorXs > > (const context::Model &, context::Data &, const Eigen::MatrixBase< Eigen::Ref< const context::VectorXs >> &) |
| template PINOCCHIO_EXPLICIT_INSTANTIATION_DEFINITION_DLLAPI context::Matrix6xs | pinocchio::getJointJacobian< context::Scalar, context::Options, JointCollectionDefaultTpl > (const context::Model &, const context::Data &, const JointIndex, const ReferenceFrame) |
| template PINOCCHIO_EXPLICIT_INSTANTIATION_DEFINITION_DLLAPI void | pinocchio::impl::getJointJacobian< context::Scalar, context::Options, JointCollectionDefaultTpl, Eigen::Ref< context::Matrix6xs > > (const context::Model &, const context::Data &, const JointIndex, const ReferenceFrame, const Eigen::MatrixBase< Eigen::Ref< context::Matrix6xs >> &) |
| template PINOCCHIO_EXPLICIT_INSTANTIATION_DEFINITION_DLLAPI void | pinocchio::impl::getJointJacobianTimeVariation< context::Scalar, context::Options, JointCollectionDefaultTpl, Eigen::Ref< context::Matrix6xs > > (const context::Model &, const context::Data &, const JointIndex, const ReferenceFrame, const Eigen::MatrixBase< Eigen::Ref< context::Matrix6xs >> &) |