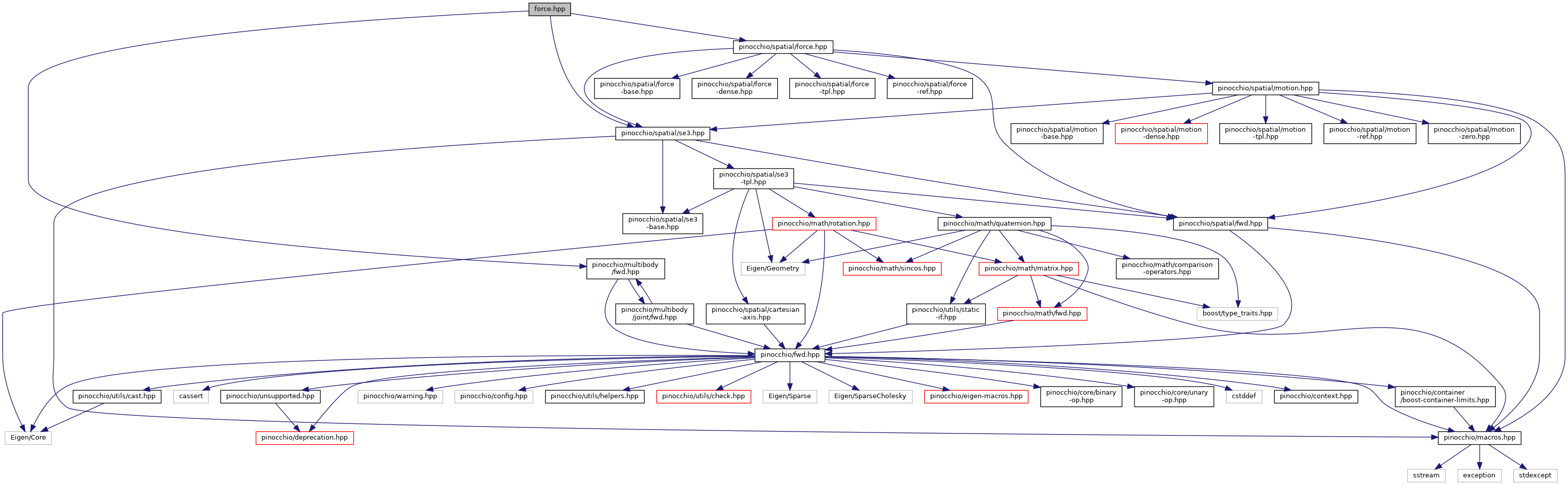
#include "pinocchio/spatial/se3.hpp"#include "pinocchio/spatial/force.hpp"#include "pinocchio/multibody/fwd.hpp"
Include dependency graph for algorithm/utils/force.hpp:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| pinocchio | |
| Main pinocchio namespace. | |
Functions | |
| template<typename Scalar , int Options, typename ForceIn > | |
| ForceIn::ForcePlain | pinocchio::changeReferenceFrame (const SE3Tpl< Scalar, Options > &placement, const ForceDense< ForceIn > &f_in, const ReferenceFrame rf_in, const ReferenceFrame rf_out) |
| template<typename Scalar , int Options, typename ForceIn , typename ForceOut > | |
| void | pinocchio::changeReferenceFrame (const SE3Tpl< Scalar, Options > &placement, const ForceDense< ForceIn > &f_in, const ReferenceFrame rf_in, const ReferenceFrame rf_out, ForceDense< ForceOut > &f_out) |