ICP registration for points and planes. More...
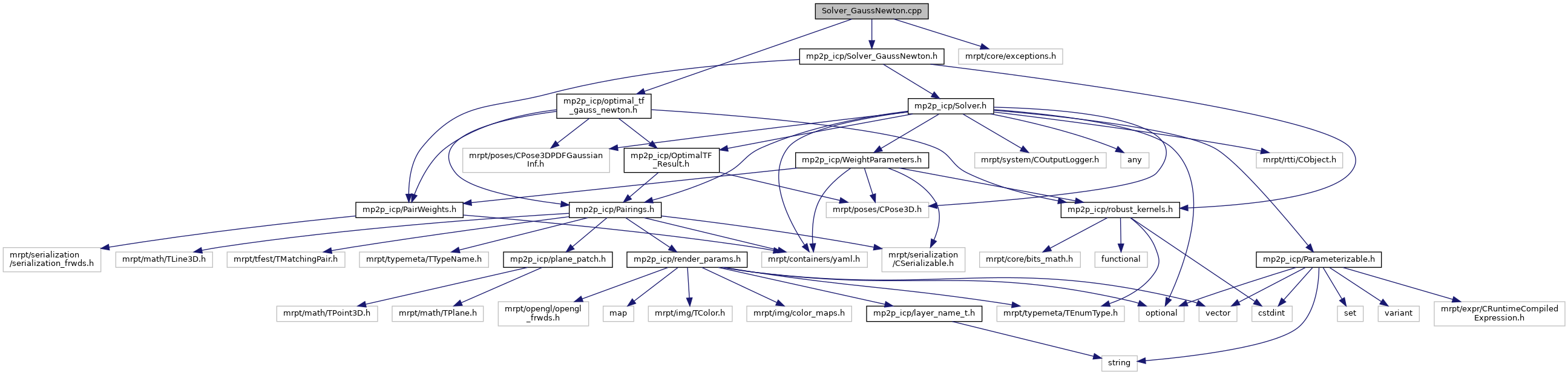
#include <mp2p_icp/Solver_GaussNewton.h>#include <mp2p_icp/optimal_tf_gauss_newton.h>#include <mrpt/core/exceptions.h>
Include dependency graph for Solver_GaussNewton.cpp:
Go to the source code of this file.