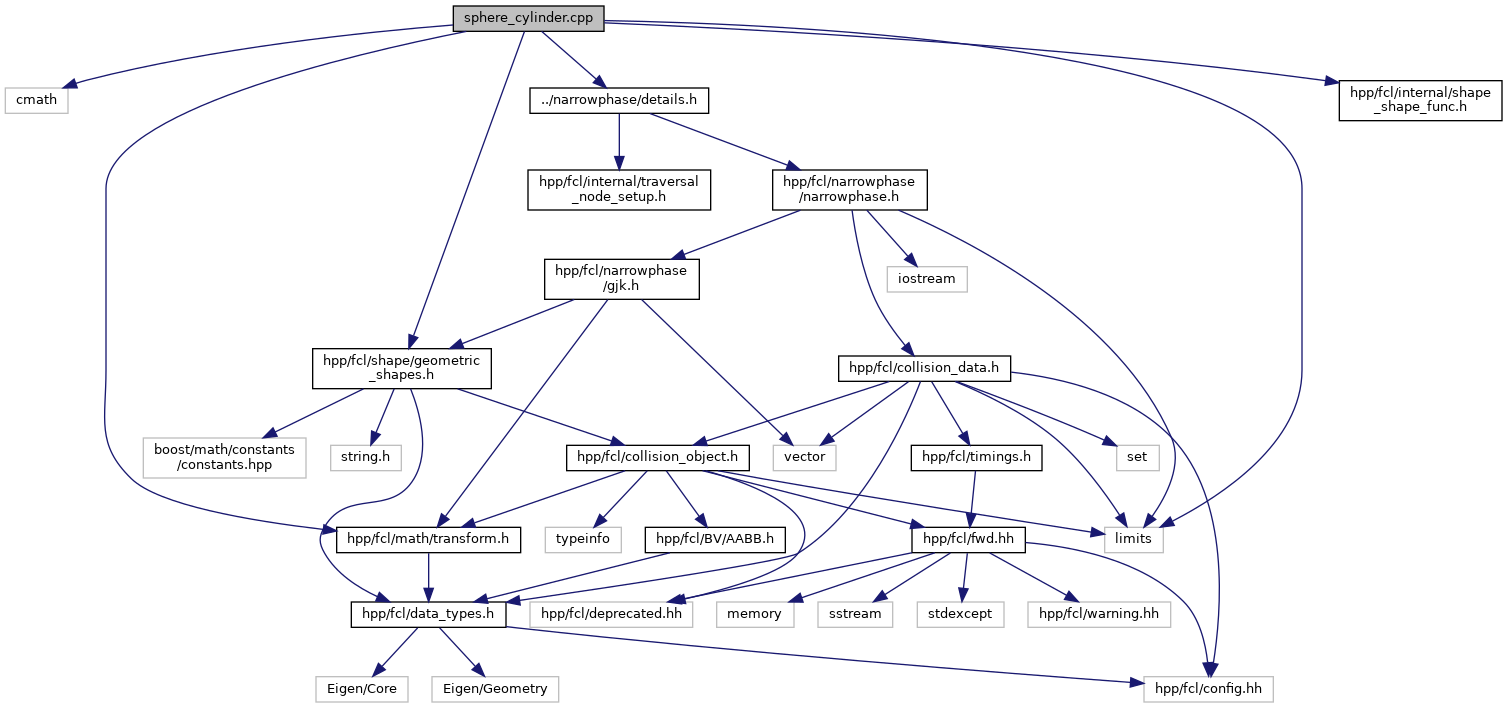
#include <cmath>#include <limits>#include <hpp/fcl/math/transform.h>#include <hpp/fcl/shape/geometric_shapes.h>#include <hpp/fcl/internal/shape_shape_func.h>#include "../narrowphase/details.h"
Include dependency graph for sphere_cylinder.cpp:
Go to the source code of this file.
Namespaces | |
| hpp | |
| Main namespace. | |
| hpp::fcl | |
Functions | |
| template<> | |
| FCL_REAL | hpp::fcl::ShapeShapeDistance< Cylinder, Sphere > (const CollisionGeometry *o1, const Transform3f &tf1, const CollisionGeometry *o2, const Transform3f &tf2, const GJKSolver *, const DistanceRequest &, DistanceResult &result) |
| template<> | |
| FCL_REAL | hpp::fcl::ShapeShapeDistance< Sphere, Cylinder > (const CollisionGeometry *o1, const Transform3f &tf1, const CollisionGeometry *o2, const Transform3f &tf2, const GJKSolver *, const DistanceRequest &, DistanceResult &result) |