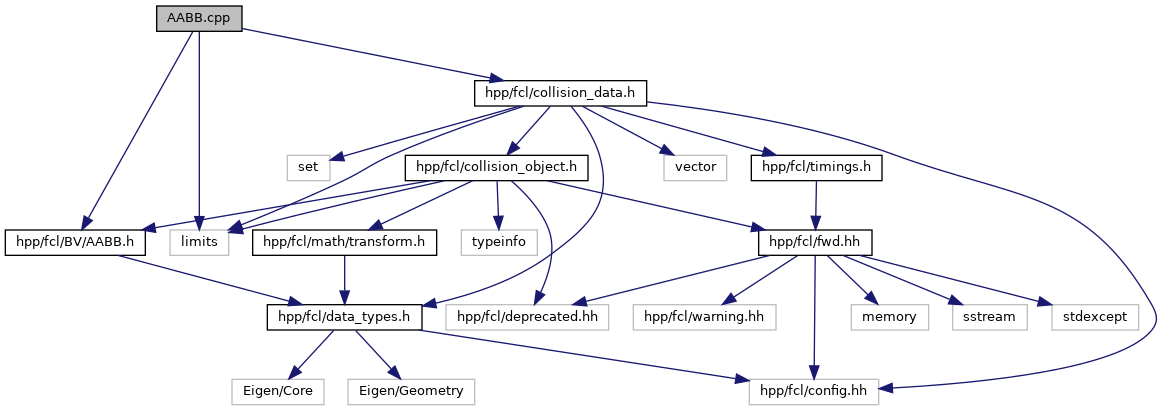
Include dependency graph for AABB.cpp:
Go to the source code of this file.
Namespaces | |
| hpp | |
| Main namespace. | |
| hpp::fcl | |
Functions | |
| HPP_FCL_DLLAPI bool | hpp::fcl::overlap (const Matrix3f &R0, const Vec3f &T0, const AABB &b1, const AABB &b2) |
| Check collision between two aabbs, b1 is in configuration (R0, T0) and b2 is in identity. More... | |
| HPP_FCL_DLLAPI bool | hpp::fcl::overlap (const Matrix3f &R0, const Vec3f &T0, const AABB &b1, const AABB &b2, const CollisionRequest &request, FCL_REAL &sqrDistLowerBound) |
| Check collision between two aabbs, b1 is in configuration (R0, T0) and b2 is in identity. More... | |