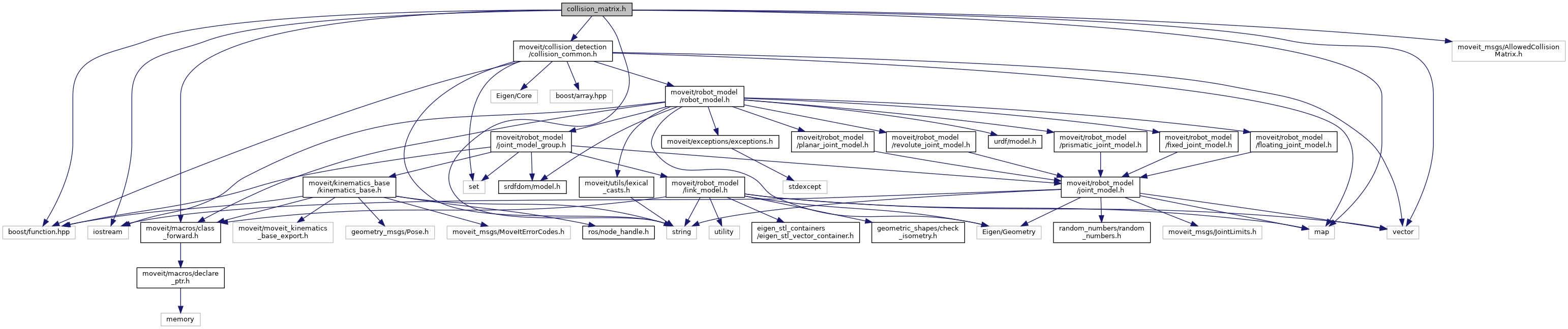
#include <moveit/collision_detection/collision_common.h>#include <moveit/macros/class_forward.h>#include <moveit_msgs/AllowedCollisionMatrix.h>#include <boost/function.hpp>#include <iostream>#include <vector>#include <string>#include <map>
Include dependency graph for collision_matrix.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | collision_detection::AllowedCollisionMatrix |
| Definition of a structure for the allowed collision matrix. More... | |
Namespaces | |
| collision_detection | |
| collision_detection::AllowedCollision | |
| Any pair of bodies can have a collision state associated to it. | |
Typedefs | |
| using | collision_detection::DecideContactFn = boost::function< bool(collision_detection::Contact &)> |
| Signature of predicate that decides whether a contact is allowed or not (when AllowedCollision::Type is CONDITIONAL) More... | |
Functions | |
| collision_detection::MOVEIT_CLASS_FORWARD (AllowedCollisionMatrix) | |