Create small example with two poses and one landmark. More...
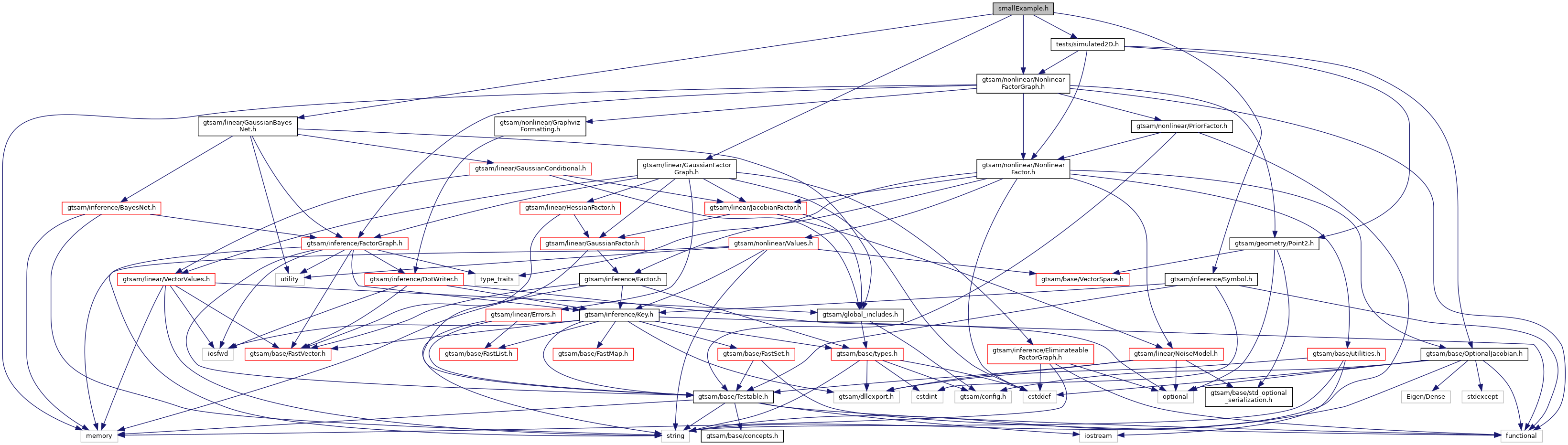
#include <tests/simulated2D.h>#include <gtsam/inference/Symbol.h>#include <gtsam/nonlinear/NonlinearFactorGraph.h>#include <gtsam/linear/GaussianBayesNet.h>#include <gtsam/linear/GaussianFactorGraph.h>
Include dependency graph for smallExample.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | gtsam::example::smallOptimize::UnaryFactor |
Namespaces | |
| gtsam | |
| traits | |
| gtsam::example | |
| gtsam::example::impl | |
| gtsam::example::smallOptimize | |
Typedefs | |
| typedef std::shared_ptr< NonlinearFactor > | gtsam::example::impl::shared_nlf |
Variables | |
| static const Key | gtsam::example::impl::_l1_ =0 |
| static const Key | gtsam::example::impl::_x1_ =1 |
| static const Key | gtsam::example::impl::_x2_ =2 |
| static const Key | gtsam::example::impl::_x_ =0 |
| static const Key | gtsam::example::impl::_y_ =1 |
| static const Key | gtsam::example::impl::_z_ =2 |
| static SharedDiagonal | gtsam::example::impl::kConstrainedModel = noiseModel::Constrained::All(2) |
| static SharedDiagonal | gtsam::example::impl::kSigma0_1 = noiseModel::Isotropic::Sigma(2,0.1) |
| static SharedDiagonal | gtsam::example::impl::kSigma0_2 = noiseModel::Isotropic::Sigma(2,0.2) |
| static SharedDiagonal | gtsam::example::impl::kSigma1_0 = noiseModel::Isotropic::Sigma(2,1.0) |
Detailed Description
Create small example with two poses and one landmark.
smallExample
Definition in file smallExample.h.