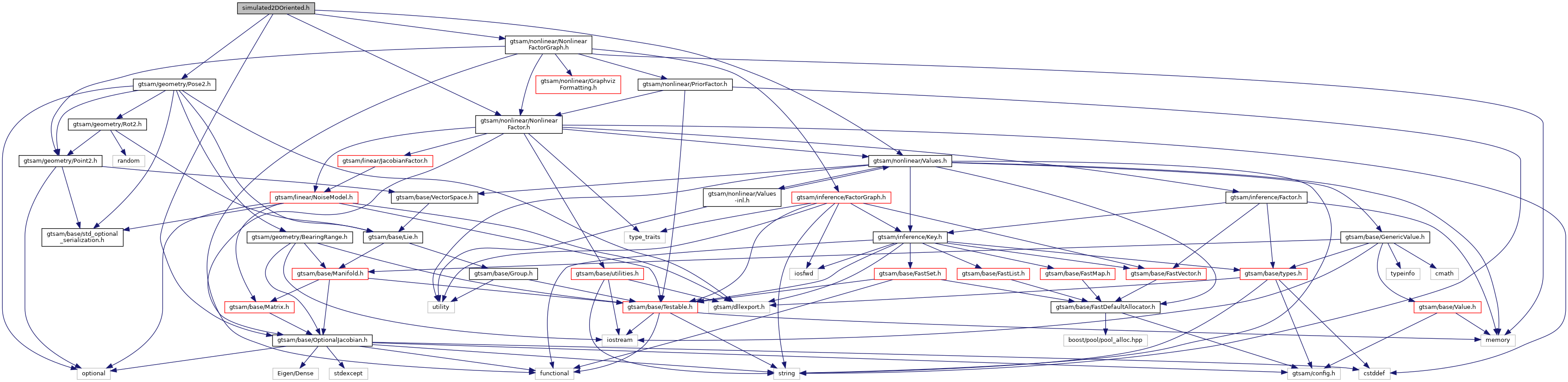
#include <gtsam/geometry/Pose2.h>#include <gtsam/nonlinear/Values.h>#include <gtsam/nonlinear/NonlinearFactor.h>#include <gtsam/nonlinear/NonlinearFactorGraph.h>#include "gtsam/base/OptionalJacobian.h"
Include dependency graph for simulated2DOriented.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | simulated2DOriented::GenericOdometry< VALUE > |
| struct | simulated2DOriented::GenericPosePrior< VALUE > |
| Unary factor encoding a soft prior on a vector. More... | |
| class | simulated2DOriented::Graph |
| Graph specialization for syntactic sugar use with matlab. More... | |
| class | simulated2DOriented::Values |
Namespaces | |
| simulated2DOriented | |
Typedefs | |
| typedef GenericOdometry< Pose2 > | simulated2DOriented::Odometry |
Functions | |
| Pose2 | simulated2DOriented::odo (const Pose2 &x1, const Pose2 &x2) |
| odometry between two poses More... | |
| Pose2 | simulated2DOriented::odo (const Pose2 &x1, const Pose2 &x2, OptionalJacobian< 3, 3 > H1=OptionalNone, OptionalJacobian< 3, 3 > H2=OptionalNone) |
| odometry between two poses, optional derivative version More... | |
| Pose2 | simulated2DOriented::prior (const Pose2 &x) |
| Prior on a single pose. More... | |
| Pose2 | simulated2DOriented::prior (const Pose2 &x, OptionalJacobian< 3, 3 > H=OptionalNone) |
| Prior on a single pose, optional derivative version. More... | |