A simple data structure for a track in Structure from Motion. More...
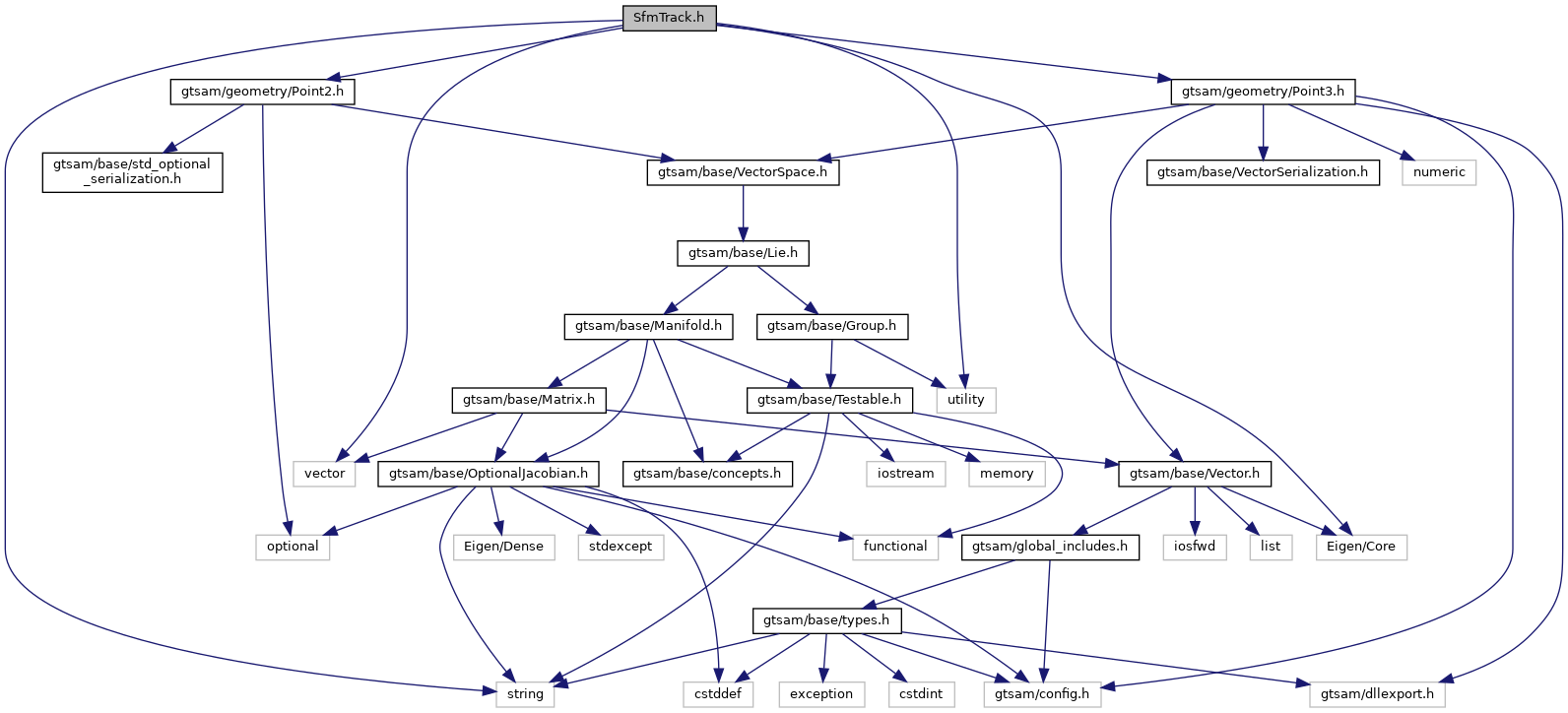
#include <gtsam/geometry/Point2.h>#include <gtsam/geometry/Point3.h>#include <Eigen/Core>#include <string>#include <utility>#include <vector>
Include dependency graph for SfmTrack.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | gtsam::SfmTrack |
| struct | gtsam::SfmTrack2d |
| Track containing 2D measurements associated with a single 3D point. Note: Equivalent to gtsam.SfmTrack, but without the 3d measurement. This class holds data temporarily before 3D point is initialized. More... | |
| struct | gtsam::traits< T > |
| struct | gtsam::traits< SfmTrack > |
Namespaces | |
| gtsam | |
| traits | |
Typedefs | |
| typedef std::pair< size_t, Point2 > | gtsam::SfmMeasurement |
| A measurement with its camera index. More... | |
| using | gtsam::SfmTrack2dVector = list |
| typedef std::pair< size_t, size_t > | gtsam::SiftIndex |
| Sift index for SfmTrack. More... | |
Detailed Description
A simple data structure for a track in Structure from Motion.
- Date
- January 2022
Definition in file SfmTrack.h.