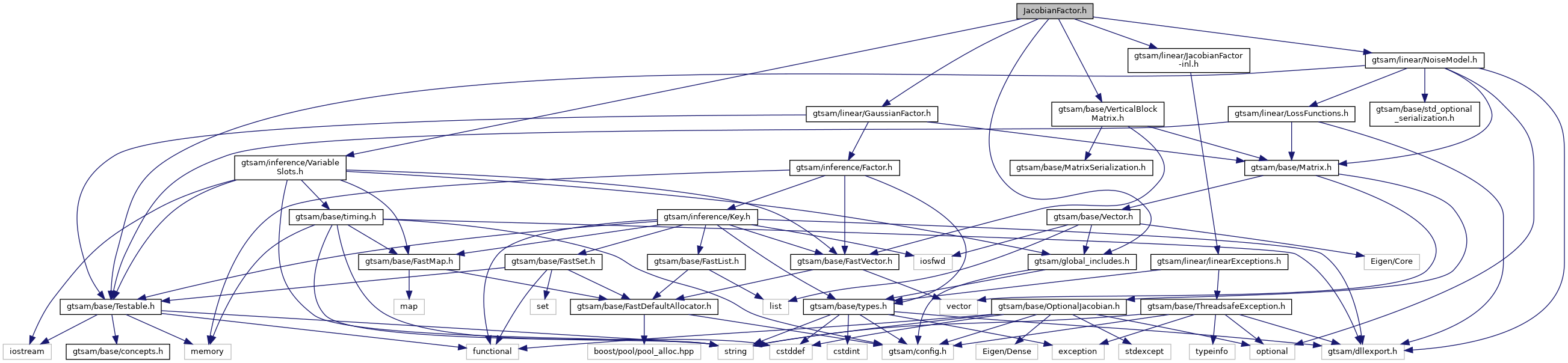
#include <gtsam/linear/GaussianFactor.h>#include <gtsam/linear/NoiseModel.h>#include <gtsam/base/VerticalBlockMatrix.h>#include <gtsam/global_includes.h>#include <gtsam/inference/VariableSlots.h>#include <gtsam/linear/JacobianFactor-inl.h>
Include dependency graph for JacobianFactor.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | gtsam::JacobianFactor |
| struct | gtsam::traits< JacobianFactor > |
| traits More... | |
Namespaces | |
| gtsam | |
| traits | |
Functions | |
| std::pair< GaussianConditional::shared_ptr, JacobianFactor::shared_ptr > | gtsam::EliminateQR (const GaussianFactorGraph &factors, const Ordering &keys) |
Detailed Description
- Date
- Dec 8, 2010
Definition in file JacobianFactor.h.