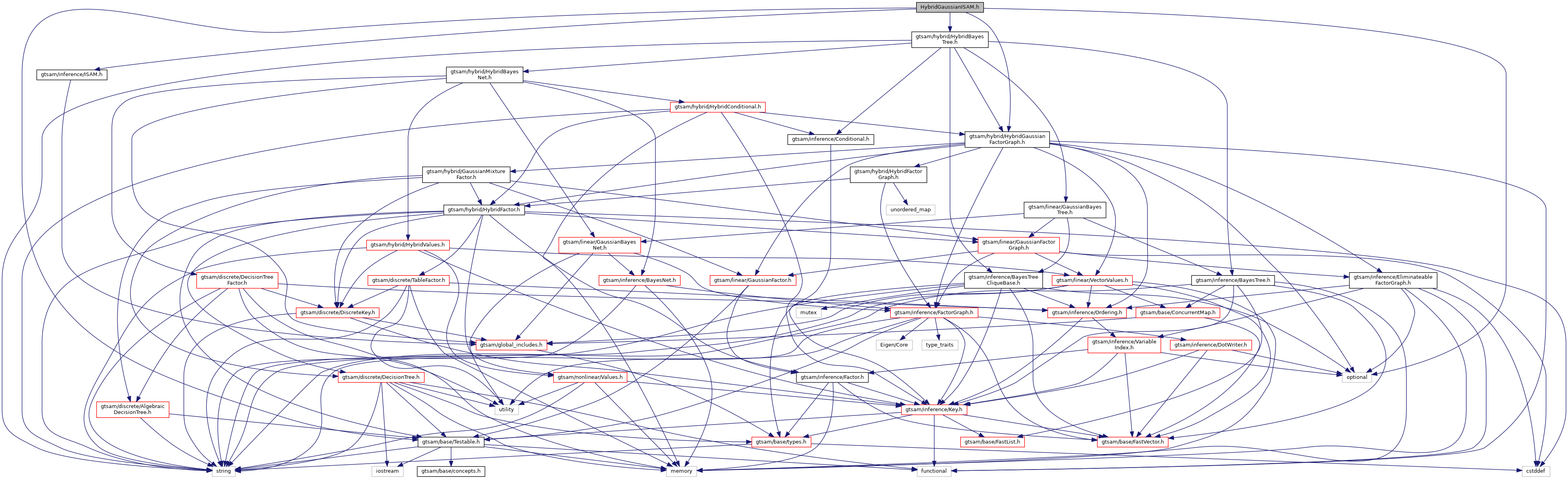
#include <gtsam/base/Testable.h>#include <gtsam/hybrid/HybridBayesTree.h>#include <gtsam/hybrid/HybridGaussianFactorGraph.h>#include <gtsam/inference/ISAM.h>#include <optional>
Include dependency graph for HybridGaussianISAM.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | gtsam::HybridGaussianISAM |
| Incremental Smoothing and Mapping (ISAM) algorithm for hybrid factor graphs. More... | |
| struct | gtsam::traits< HybridGaussianISAM > |
| traits More... | |
Namespaces | |
| gtsam | |
| traits | |
Detailed Description
- Date
- March 31, 2022
Definition in file HybridGaussianISAM.h.