a general SFM factor with an unknown calibration More...
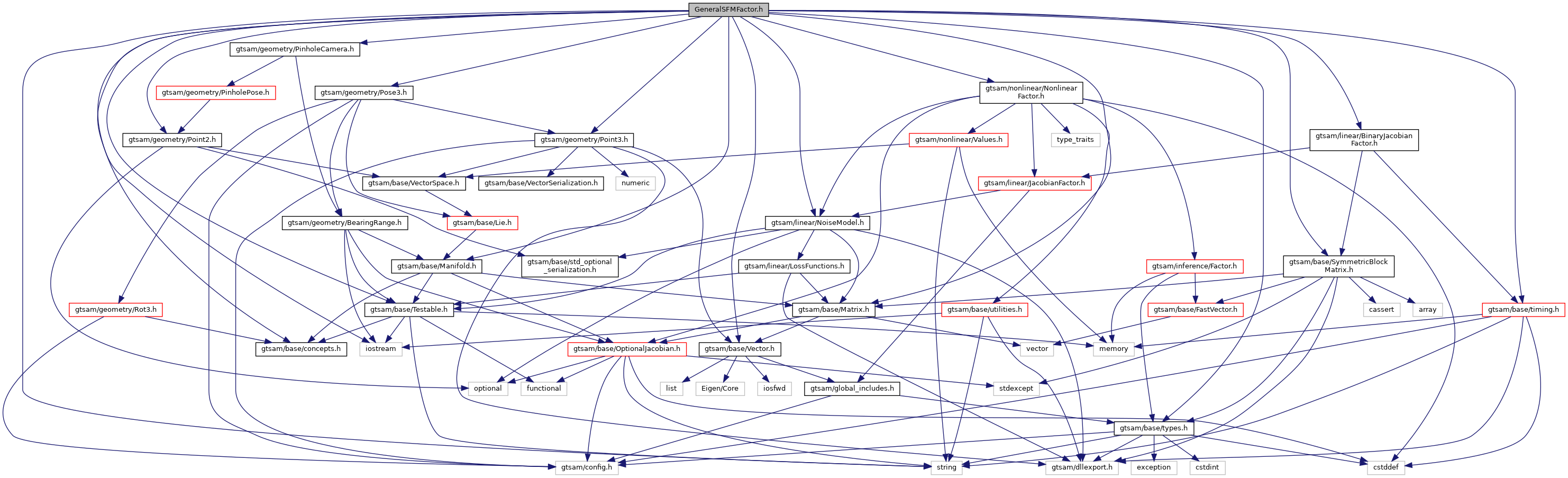
#include <gtsam/geometry/PinholeCamera.h>#include <gtsam/geometry/Point2.h>#include <gtsam/geometry/Point3.h>#include <gtsam/geometry/Pose3.h>#include <gtsam/nonlinear/NonlinearFactor.h>#include <gtsam/linear/BinaryJacobianFactor.h>#include <gtsam/linear/NoiseModel.h>#include <gtsam/base/concepts.h>#include <gtsam/base/Manifold.h>#include <gtsam/base/Matrix.h>#include <gtsam/base/SymmetricBlockMatrix.h>#include <gtsam/base/types.h>#include <gtsam/base/Testable.h>#include <gtsam/base/Vector.h>#include <gtsam/base/timing.h>#include <iostream>#include <string>
Include dependency graph for GeneralSFMFactor.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| boost | |
| boost::serialization | |
| gtsam | |
| traits | |
Detailed Description
a general SFM factor with an unknown calibration
- Date
- Dec 15, 2010
Definition in file GeneralSFMFactor.h.