Identifies connected components in the keypoint matches graph. More...
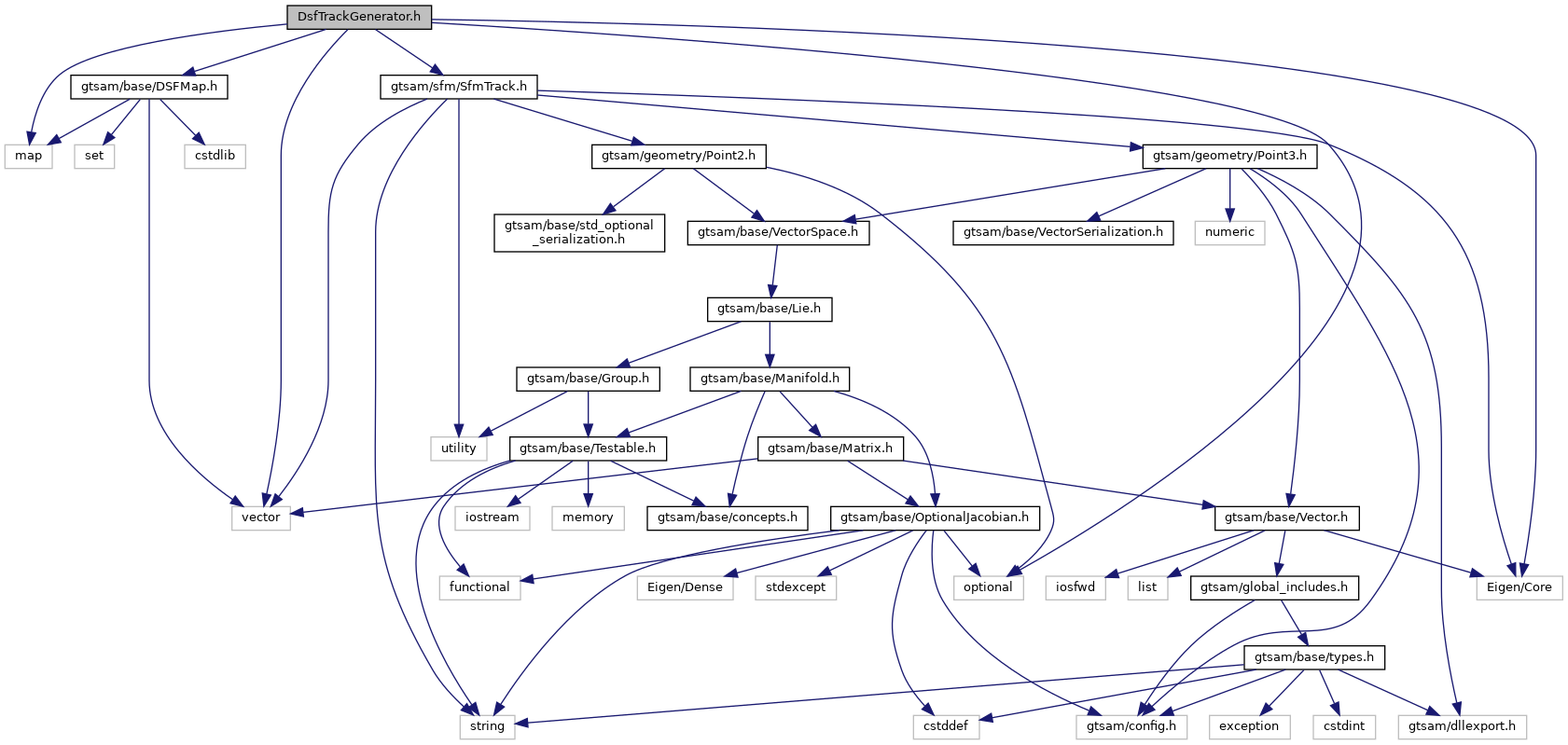
#include <gtsam/base/DSFMap.h>#include <gtsam/sfm/SfmTrack.h>#include <Eigen/Core>#include <map>#include <optional>#include <vector>
Include dependency graph for DsfTrackGenerator.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | gtsam::gtsfm::Keypoints |
Namespaces | |
| gtsam | |
| traits | |
| gtsam::gtsfm | |
Typedefs | |
| typedef Eigen::MatrixX2i | gtsam::gtsfm::CorrespondenceIndices |
| using | gtsam::gtsfm::KeypointsVector = std::vector< Keypoints > |
| using | gtsam::gtsfm::MatchIndicesMap = std::map< IndexPair, CorrespondenceIndices > |
Functions | |
| std::vector< SfmTrack2d > | gtsam::gtsfm::tracksFromPairwiseMatches (const MatchIndicesMap &matches, const KeypointsVector &keypoints, bool verbose) |
| Creates a list of tracks from 2d point correspondences. More... | |
Detailed Description
Identifies connected components in the keypoint matches graph.
- Date
- July 2022
Definition in file DsfTrackGenerator.h.