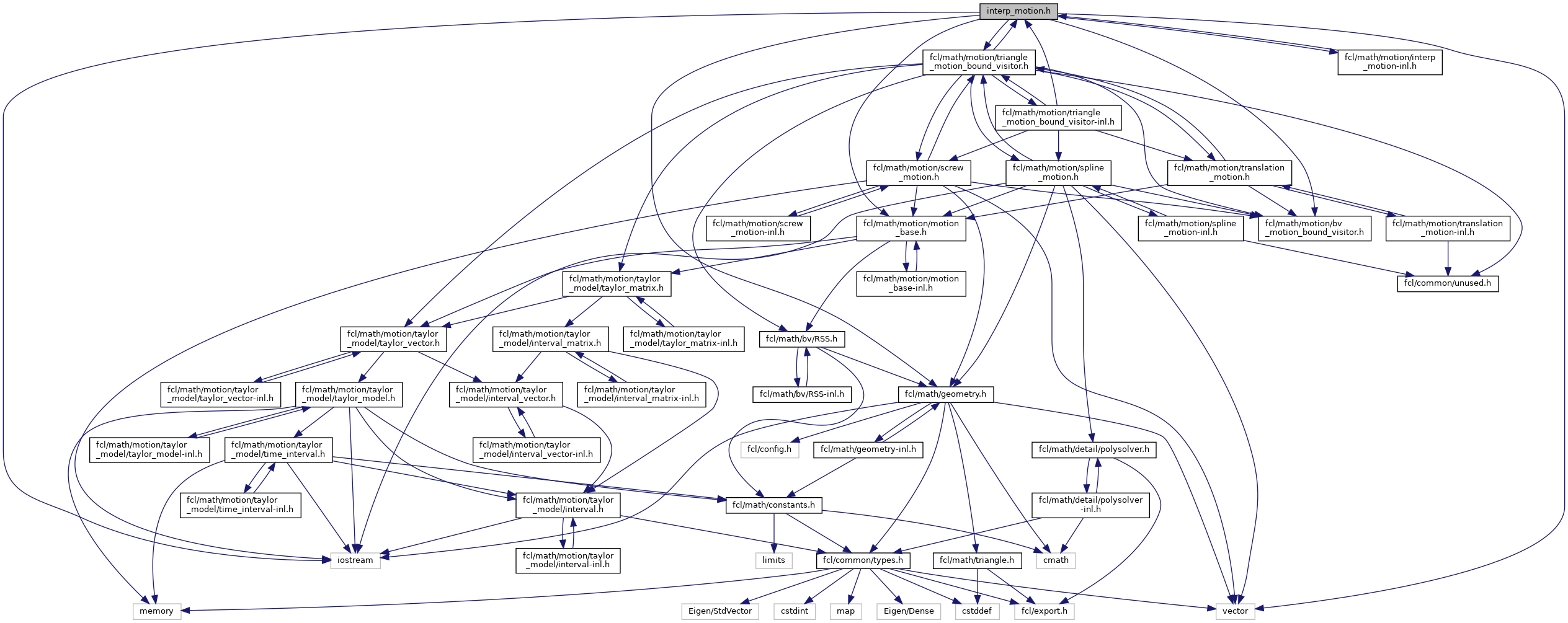
#include <iostream>#include <vector>#include "fcl/math/geometry.h"#include "fcl/math/motion/motion_base.h"#include "fcl/math/motion/bv_motion_bound_visitor.h"#include "fcl/math/motion/triangle_motion_bound_visitor.h"#include "fcl/math/motion/interp_motion-inl.h"
Include dependency graph for interp_motion.h:
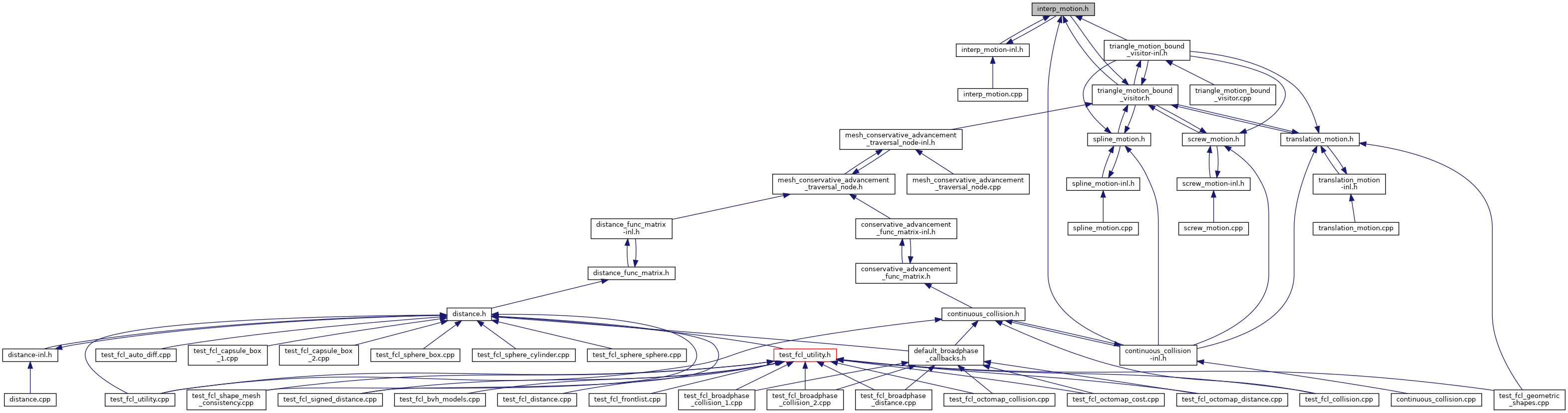
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | fcl::InterpMotion< S > |
| Linear interpolation motion Each Motion is assumed to have constant linear velocity and angular velocity The motion is R(t)(p - p_ref) + p_ref + T(t) Therefore, R(0) = R0, R(1) = R1 T(0) = T0 + R0 p_ref - p_ref T(1) = T1 + R1 p_ref - p_ref. More... | |
Namespaces | |
| fcl | |
| Main namespace. | |