#include <memory>#include "fcl/math/bv/AABB.h"#include "fcl/math/motion/motion_base.h"#include "fcl/geometry/collision_geometry-inl.h"
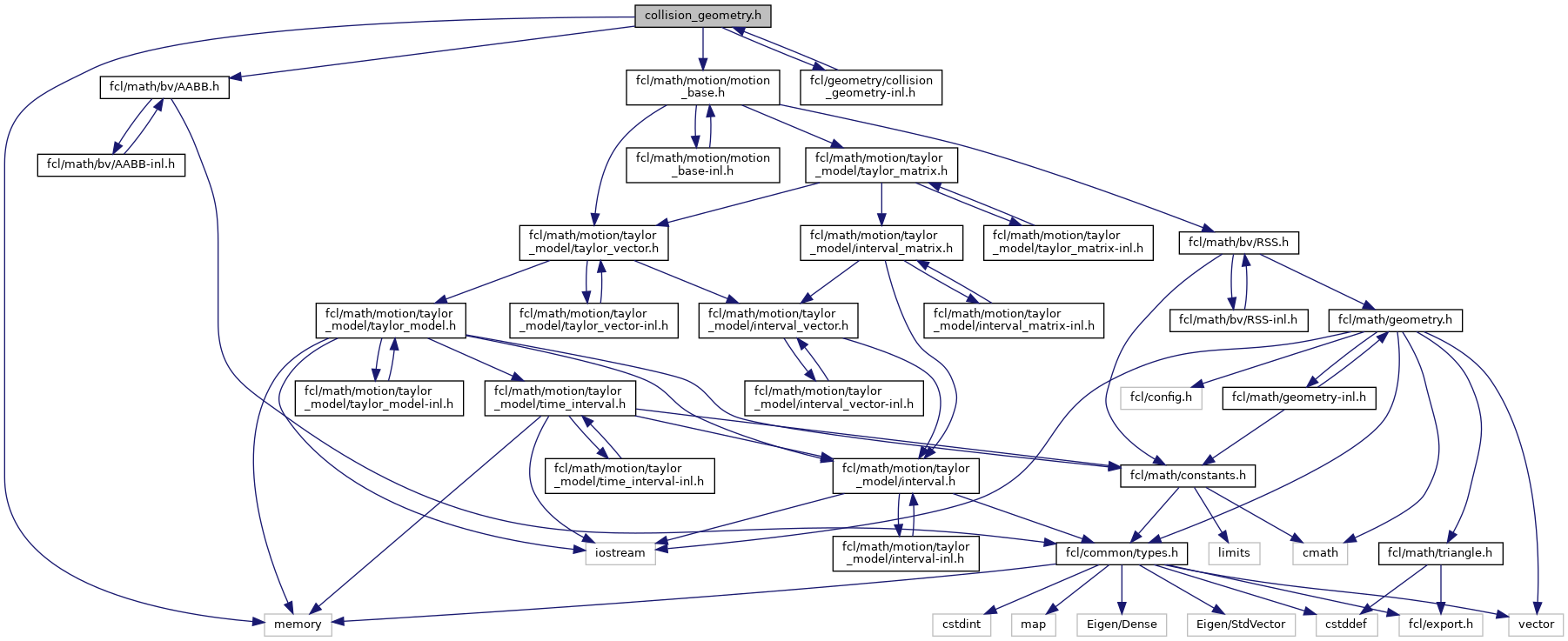
Include dependency graph for collision_geometry.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | fcl::CollisionGeometry< S > |
| The geometry for the object for collision or distance computation. More... | |
Namespaces | |
| fcl | |
| Main namespace. | |
Typedefs | |
| using | fcl::CollisionGeometryd = CollisionGeometry< double > |
| using | fcl::CollisionGeometryf = CollisionGeometry< float > |
Enumerations | |
| enum | fcl::NODE_TYPE { fcl::BV_UNKNOWN, fcl::BV_AABB, fcl::BV_OBB, fcl::BV_RSS, fcl::BV_kIOS, fcl::BV_OBBRSS, fcl::BV_KDOP16, fcl::BV_KDOP18, fcl::BV_KDOP24, fcl::GEOM_BOX, fcl::GEOM_SPHERE, fcl::GEOM_ELLIPSOID, fcl::GEOM_CAPSULE, fcl::GEOM_CONE, fcl::GEOM_CYLINDER, fcl::GEOM_CONVEX, fcl::GEOM_PLANE, fcl::GEOM_HALFSPACE, fcl::GEOM_TRIANGLE, fcl::GEOM_OCTREE, fcl::NODE_COUNT } |
| traversal node type: bounding volume (AABB, OBB, RSS, kIOS, OBBRSS, KDOP16, KDOP18, kDOP24), basic shape (box, sphere, ellipsoid, capsule, cone, cylinder, convex, plane, halfspace, triangle), and octree More... | |
| enum | fcl::OBJECT_TYPE { fcl::OT_UNKNOWN, fcl::OT_BVH, fcl::OT_GEOM, fcl::OT_OCTREE, fcl::OT_COUNT } |
| object type: BVH (mesh, points), basic geometry, octree More... | |