#include "fcl/math/bv/OBBRSS.h"
Include dependency graph for OBBRSS-inl.h:
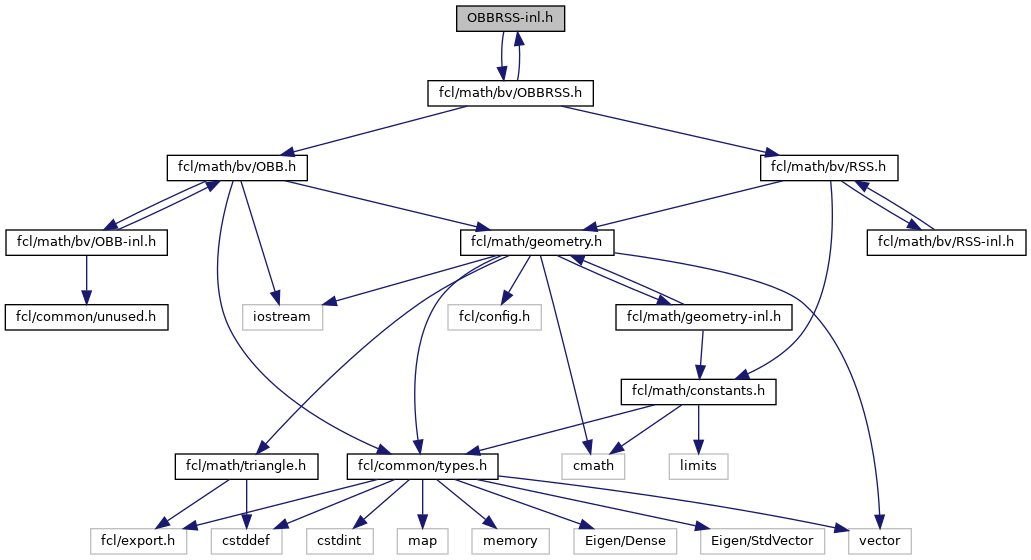
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| fcl | |
| Main namespace. | |
Functions | |
| template<typename S , typename DerivedA , typename DerivedB > | |
| S | fcl::distance (const Eigen::MatrixBase< DerivedA > &R0, const Eigen::MatrixBase< DerivedB > &T0, const OBBRSS< S > &b1, const OBBRSS< S > &b2, Vector3< S > *P, Vector3< S > *Q) |
| Computate distance between two OBBRSS, b1 is in configuation (R0, T0) and b2 is in indentity; P and Q, is not nullptr, returns the nearest points. More... | |
| template<typename S , typename DerivedA , typename DerivedB > | |
| bool | fcl::overlap (const Eigen::MatrixBase< DerivedA > &R0, const Eigen::MatrixBase< DerivedB > &T0, const OBBRSS< S > &b1, const OBBRSS< S > &b2) |
| Check collision between two OBBRSS, b1 is in configuration (R0, T0) and b2 is in indentity. More... | |
| template OBBRSS< double > | fcl::translate (const OBBRSS< double > &bv, const Vector3< double > &t) |
| template<typename S > | |
| OBBRSS< S > | fcl::translate (const OBBRSS< S > &bv, const Vector3< S > &t) |
| Translate the OBBRSS bv. More... | |
Variables | |
| template class FCL_EXPORT | fcl::OBBRSS< double > |