This file adds utility functions to be used within nodes. It makes ParamHelper templated getParam() functions accessible via static global calls cras::getParam(nh, ...). It also exposes cras::NodeHandle utility class for even easier access to parameter getting. More...
#include <memory>#include <string>#include <ros/ros.h>#include <cras_cpp_common/log_utils/node.h>#include <cras_cpp_common/node_utils/node_handle.h>#include <cras_cpp_common/optional.hpp>#include <cras_cpp_common/param_utils/bound_param_helper.hpp>#include <cras_cpp_common/param_utils/param_helper.hpp>#include <cras_cpp_common/param_utils/get_param_adapters/node_handle.hpp>
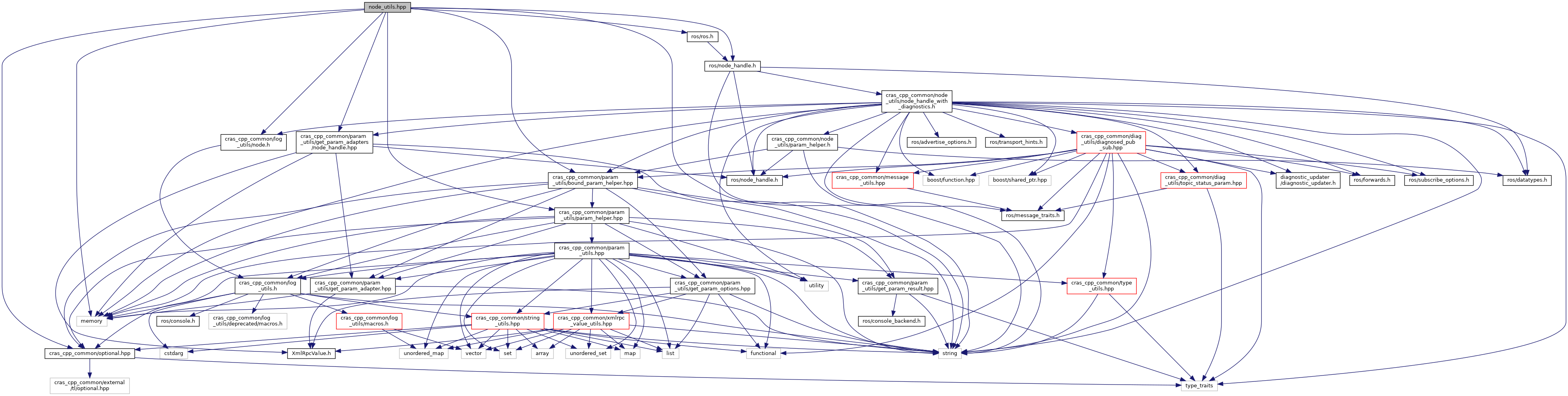
Include dependency graph for node_utils.hpp:
Go to the source code of this file.
Namespaces | |
| cras | |
Functions | |
| inline ::std::string | cras::getParam (const ::ros::NodeHandle &node, const ::std::string &name, const ::cras::optional< const char * > &defaultValue, const ::std::string &unit="", const ::cras::GetParamOptions<::std::string > &options={}) |
| Get the value of the given ROS parameter, falling back to the specified default value (if not nullopt), and print out a ROS log message with the loaded values (if specified). More... | |
| template<typename ResultType , typename ParamServerType = typename ::cras::DefaultParamServerType<ResultType>::type, ::cras::check_get_param_types< ResultType, ParamServerType > * = nullptr> | |
| ResultType | cras::getParam (const ::ros::NodeHandle &node, const ::std::string &name, const ::cras::optional< ResultType > &defaultValue=ResultType(), const ::std::string &unit="", const ::cras::GetParamOptions< ResultType, ParamServerType > &options={}) |
| Get the value of the given ROS parameter, falling back to the specified default value (if not nullopt), and print out a ROS log message with the loaded values (if specified). More... | |
| inline ::std::string | cras::getParam (const ::ros::NodeHandle &node, const ::std::string &name, const char *defaultValue, const ::std::string &unit="", const ::cras::GetParamOptions< std::string > &options={}) |
| Get the value of the given ROS parameter, falling back to the specified default value, and print out a ROS log message with the loaded values (if specified). More... | |
| template<typename ResultType , typename ParamServerType = typename ::cras::DefaultParamServerType<ResultType>::type, ::cras::check_get_param_types< ResultType, ParamServerType > * = nullptr> | |
| ResultType | cras::getParam (const ::ros::NodeHandle &node, const ::std::string &name, const ResultType &defaultValue=ResultType(), const ::std::string &unit="", const ::cras::GetParamOptions< ResultType, ParamServerType > &options={}) |
| Get the value of the given ROS parameter, falling back to the specified default value, and print out a ROS log message with the loaded values (if specified). More... | |
| GetParamResult<::std::string > | cras::getParamVerbose (const ::ros::NodeHandle &node, const ::std::string &name, const ::cras::optional< const char * > &defaultValue, const ::std::string &unit="", const ::cras::GetParamOptions<::std::string > &options={}) |
| Get the value of the given ROS parameter, falling back to the specified default value (if not nullopt), and print out a ROS log message with the loaded values (if specified). More... | |
| template<typename ResultType , typename ParamServerType = typename ::cras::DefaultParamServerType<ResultType>::type, ::cras::check_get_param_types< ResultType, ParamServerType > * = nullptr> | |
| GetParamResult< ResultType > | cras::getParamVerbose (const ::ros::NodeHandle &node, const ::std::string &name, const ::cras::optional< ResultType > &defaultValue=ResultType(), const ::std::string &unit="", const ::cras::GetParamOptions< ResultType, ParamServerType > &options={}) |
| Get the value of the given ROS parameter, falling back to the specified default value (if not nullopt), and print out a ROS log message with the loaded values (if specified). More... | |
| GetParamResult<::std::string > | cras::getParamVerbose (const ::ros::NodeHandle &node, const ::std::string &name, const char *defaultValue, const ::std::string &unit="", const ::cras::GetParamOptions<::std::string > &options={}) |
| Get the value of the given ROS parameter, falling back to the specified default value, and print out a ROS log message with the loaded values (if specified). More... | |
| template<typename ResultType , typename ParamServerType = typename ::cras::DefaultParamServerType<ResultType>::type, ::cras::check_get_param_types< ResultType, ParamServerType > * = nullptr> | |
| GetParamResult< ResultType > | cras::getParamVerbose (const ::ros::NodeHandle &node, const ::std::string &name, const ResultType &defaultValue=ResultType(), const ::std::string &unit="", const ::cras::GetParamOptions< ResultType, ParamServerType > &options={}) |
| Get the value of the given ROS parameter, falling back to the specified default value, and print out a ROS log message with the loaded values (if specified). More... | |
| inline ::cras::BoundParamHelperPtr | cras::nodeParams (const ::ros::NodeHandle &node, const ::std::string &ns="") |
| Returns a param helper structure "bound" to the given node handle, so that it is not needed to specify the node handle in the subsequent getParam() calls. More... | |
| inline ::cras::BoundParamHelperPtr | cras::paramsForNodeHandle (const ::ros::NodeHandle &node) |
| Returns a param helper structure "bound" to the given node handle, so that it is not needed to specify the node handle in the subsequent getParam() calls. More... | |
Variables | |
| const ParamHelper | cras::paramHelper (::std::make_shared<::cras::NodeLogHelper >()) |
Detailed Description
This file adds utility functions to be used within nodes. It makes ParamHelper templated getParam() functions accessible via static global calls cras::getParam(nh, ...). It also exposes cras::NodeHandle utility class for even easier access to parameter getting.
Definition in file node_utils.hpp.