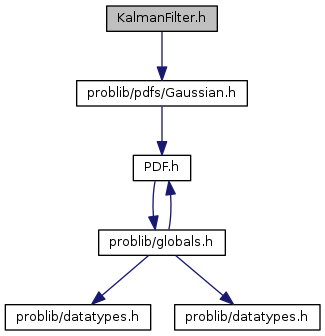
#include "problib/pdfs/Gaussian.h"
Include dependency graph for KalmanFilter.h:
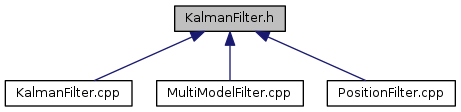
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | KalmanFilter |
| Kalman filter with constant-velocity system model. The system noise is automatically calculated from the maximum expected acceleration which can be set as a parameter. More... | |