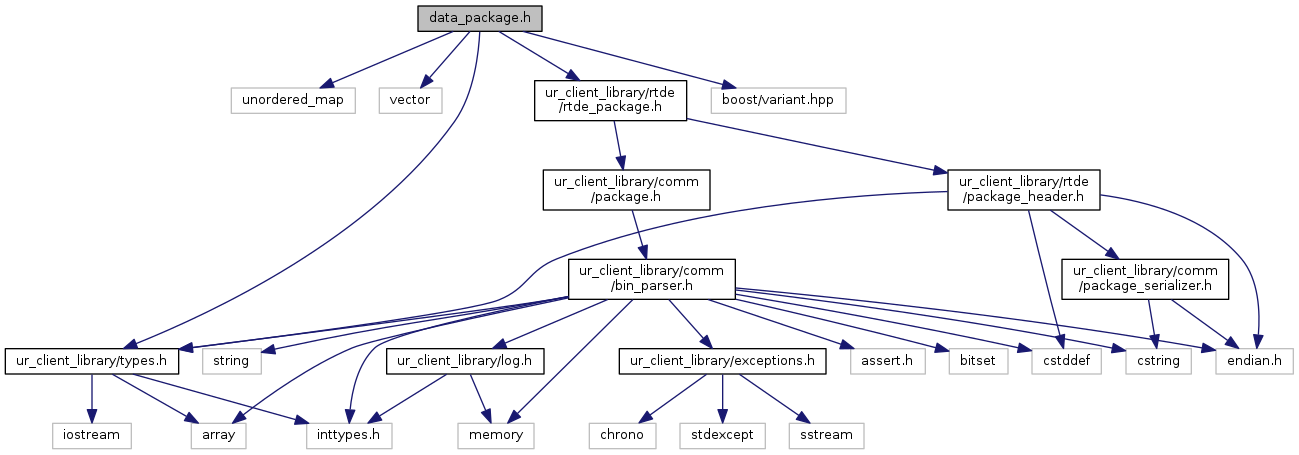
#include <unordered_map>#include <vector>#include "ur_client_library/types.h"#include "ur_client_library/rtde/rtde_package.h"#include <boost/variant.hpp>
Include dependency graph for data_package.h:
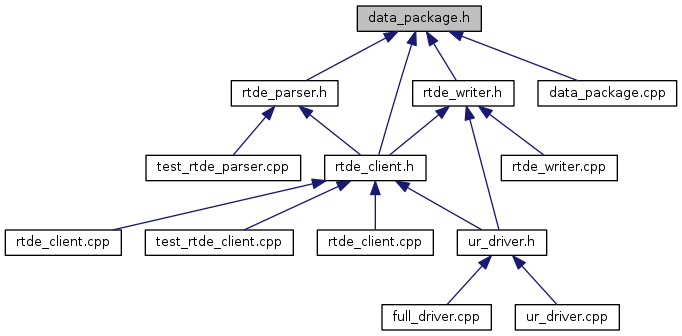
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | urcl::rtde_interface::DataPackage |
| The DataPackage class handles communication in the form of RTDE data packages both to and from the robot. It contains functionality to parse and serialize packages for arbitrary recipes. More... | |
| struct | urcl::rtde_interface::DataPackage::ParseVisitor |
| struct | urcl::rtde_interface::DataPackage::SerializeVisitor |
| struct | urcl::rtde_interface::DataPackage::SizeVisitor |
| struct | urcl::rtde_interface::DataPackage::StringVisitor |
Namespaces | |
| urcl | |
| urcl::rtde_interface | |
Enumerations | |
| enum | urcl::rtde_interface::RUNTIME_STATE : uint32_t { urcl::rtde_interface::RUNTIME_STATE::STOPPING = 0, urcl::rtde_interface::RUNTIME_STATE::STOPPED = 1, urcl::rtde_interface::RUNTIME_STATE::PLAYING = 2, urcl::rtde_interface::RUNTIME_STATE::PAUSING = 3, urcl::rtde_interface::RUNTIME_STATE::PAUSED = 4, urcl::rtde_interface::RUNTIME_STATE::RESUMING = 5 } |
| Possible values for the runtime state. More... | |
Detailed Description
- Date
- 2019-04-01
Definition in file data_package.h.