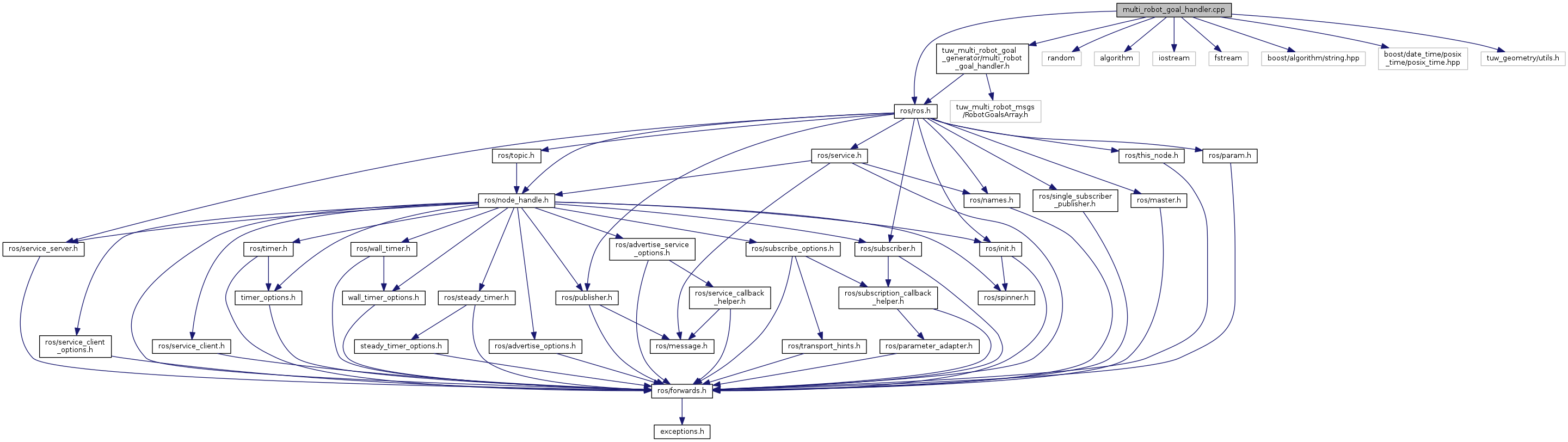
#include "ros/ros.h"#include <random>#include <algorithm>#include <iostream>#include <fstream>#include "tuw_multi_robot_goal_generator/multi_robot_goal_handler.h"#include <boost/algorithm/string.hpp>#include <boost/date_time/posix_time/posix_time.hpp>#include "tuw_geometry/utils.h"
Include dependency graph for multi_robot_goal_handler.cpp: